Essence
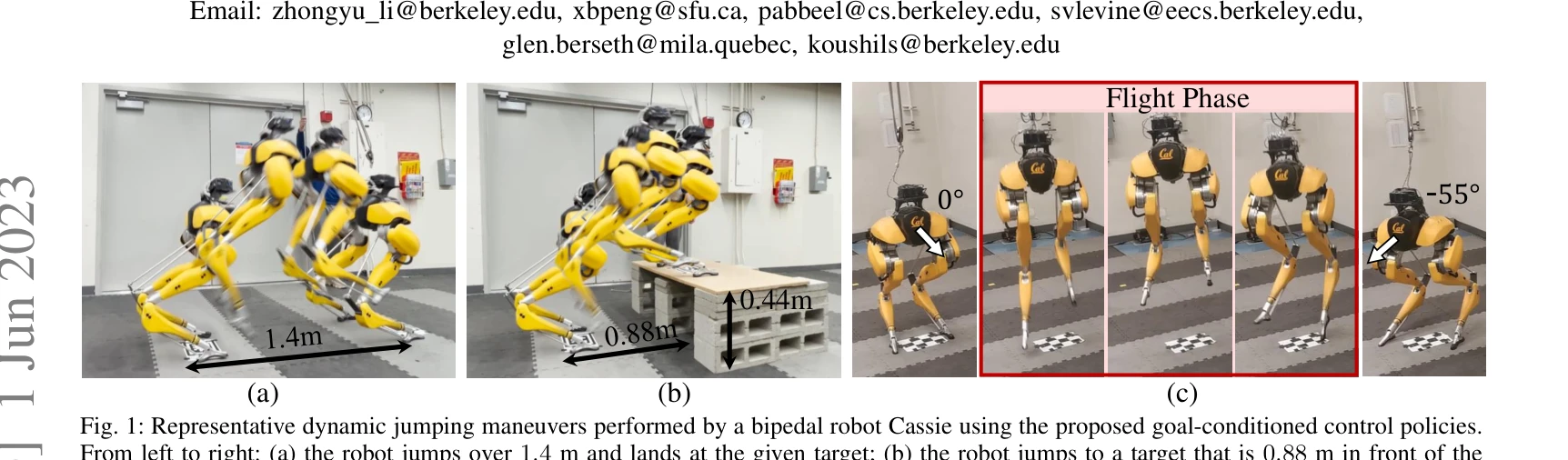
Fig. 1: Representative dynamic jumping maneuvers performed by a bipedal robot Cassie using the proposed goal-conditioned
Reinforcement learning과 새로운 정책 구조를 활용하여 이족 로봇 Cassie가 다양한 착지 위치와 방향으로 점프하는 강건하고 다목적인 동적 점프 제어를 실현했다.
저자: Zhongyu Li, Xue Bin Peng, Pieter Abbeel, Sergey Levine, Glen Berseth, Koushil Sreenath | 날짜: 2023-02-19 | URL: https://arxiv.org/abs/2302.09450 📄 PDF
Fig. 1: Representative dynamic jumping maneuvers performed by a bipedal robot Cassie using the proposed goal-conditioned
Reinforcement learning과 새로운 정책 구조를 활용하여 이족 로봇 Cassie가 다양한 착지 위치와 방향으로 점프하는 강건하고 다목적인 동적 점프 제어를 실현했다.
Fig. 1: Representative dynamic jumping maneuvers performed by a bipedal robot Cassie using the proposed goal-conditioned
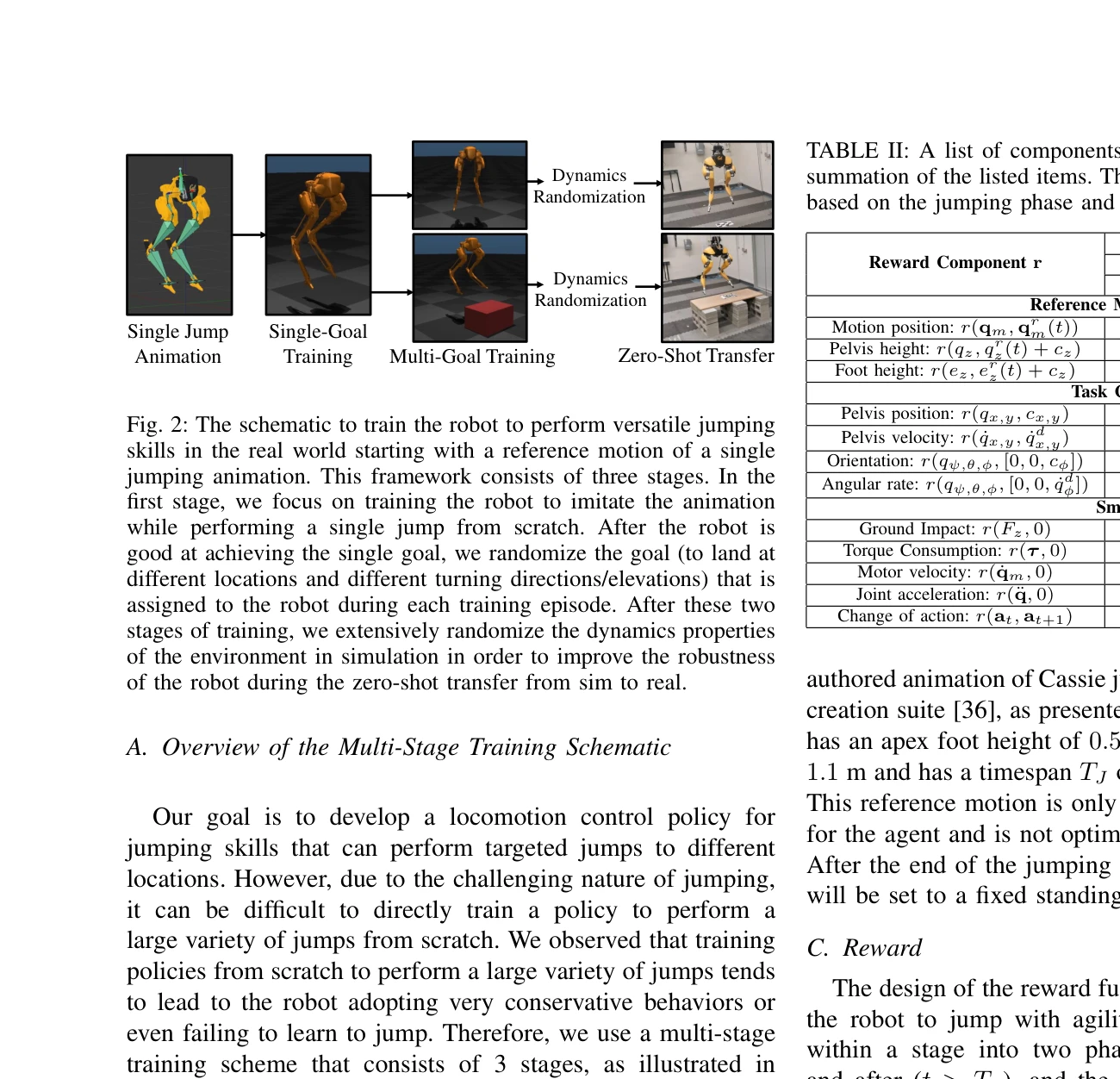
Fig. 2: The schematic to train the robot to perform versatile jumping
총평: 이족 로봇의 동적 점프 제어에서 RL과 새로운 정책 구조를 결합하여 기존 방법을 크게 뛰어넘는 실제 세계 성과를 달성한 우수한 연구이며, 다목적 강건한 로봇 제어의 새로운 가능성을 보여준다.