Essence
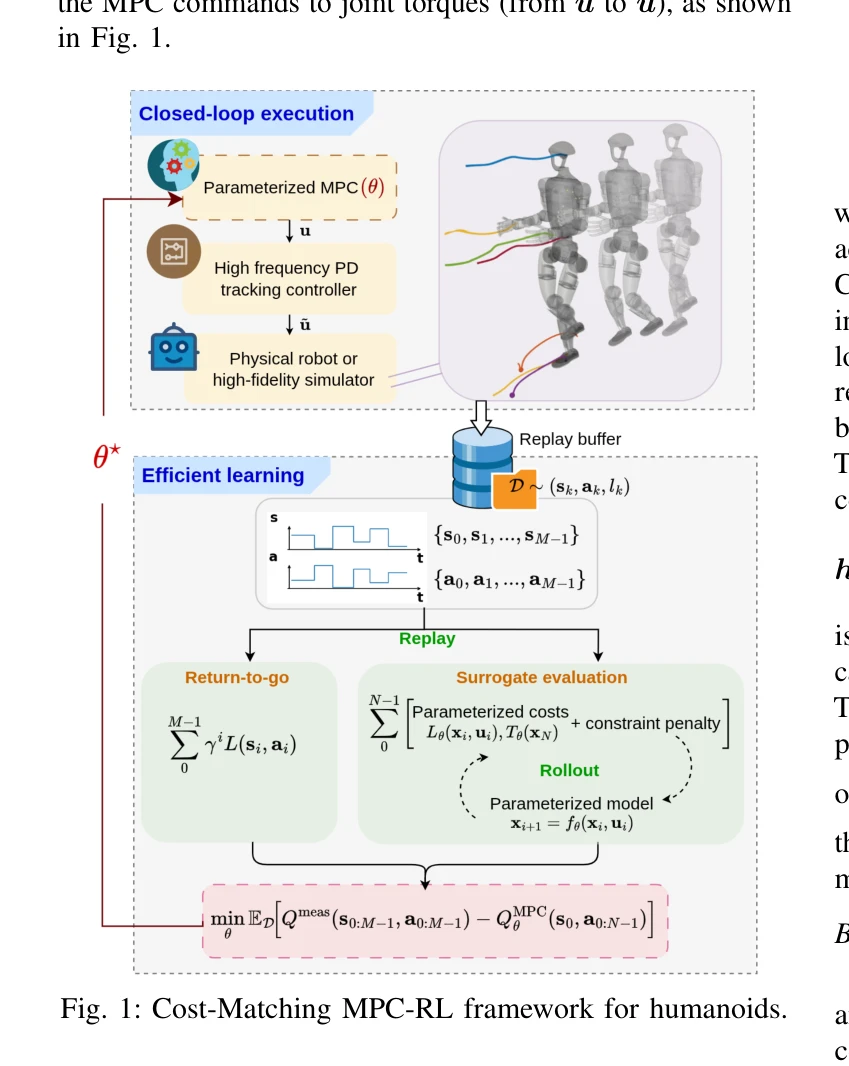
Fig. 1: Cost-Matching MPC-RL framework for humanoids.
인간형 로봇 보행 제어를 위해 MPC를 RL로 학습할 때 반복적인 MPC 해결의 계산 부담을 제거하는 Cost-Matching MPC 방법을 제안한다. 매개변수화된 MPC의 비용-미래가치(cost-to-go)와 실제 측정된 리턴값의 불일치를 최소화하여 효율적으로 학습한다.
저자: | 날짜: 2026-03-30 | URL: https://arxiv.org/abs/2603.28243 📄 PDF
Fig. 1: Cost-Matching MPC-RL framework for humanoids.
인간형 로봇 보행 제어를 위해 MPC를 RL로 학습할 때 반복적인 MPC 해결의 계산 부담을 제거하는 Cost-Matching MPC 방법을 제안한다. 매개변수화된 MPC의 비용-미래가치(cost-to-go)와 실제 측정된 리턴값의 불일치를 최소화하여 효율적으로 학습한다.
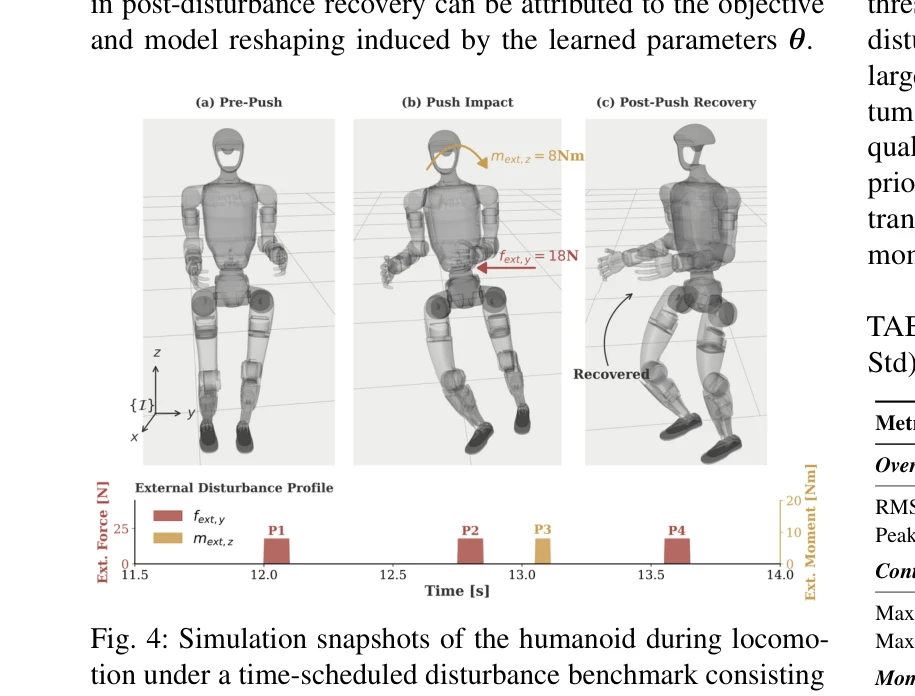
Fig. 4: Simulation snapshots of the humanoid during locomo-
Fig. 1: Cost-Matching MPC-RL framework for humanoids.
총평: 본 논문은 MPC-RL의 계산 병목을 해결하는 창의적인 cost-matching 방법을 제시하며, 복잡한 인간형 로봇 제어 문제에 체계적으로 적용한 우수한 연구다. 다만 실제 로봇 검증의 부재가 임팩트를 제한하므로, 향후 sim-to-real 전이 연구가 필요하다.