저자: Yuhang Lin, Yijia Xie, Jiahong Xie, Yuehao Huang, Ruoyu Wang, Jiajun Lv, Yukai Ma, Xingxing Zuo | 날짜: 2025-08-18 | URL: https://arxiv.org/abs/2508.14120 📄 PDF
Essence
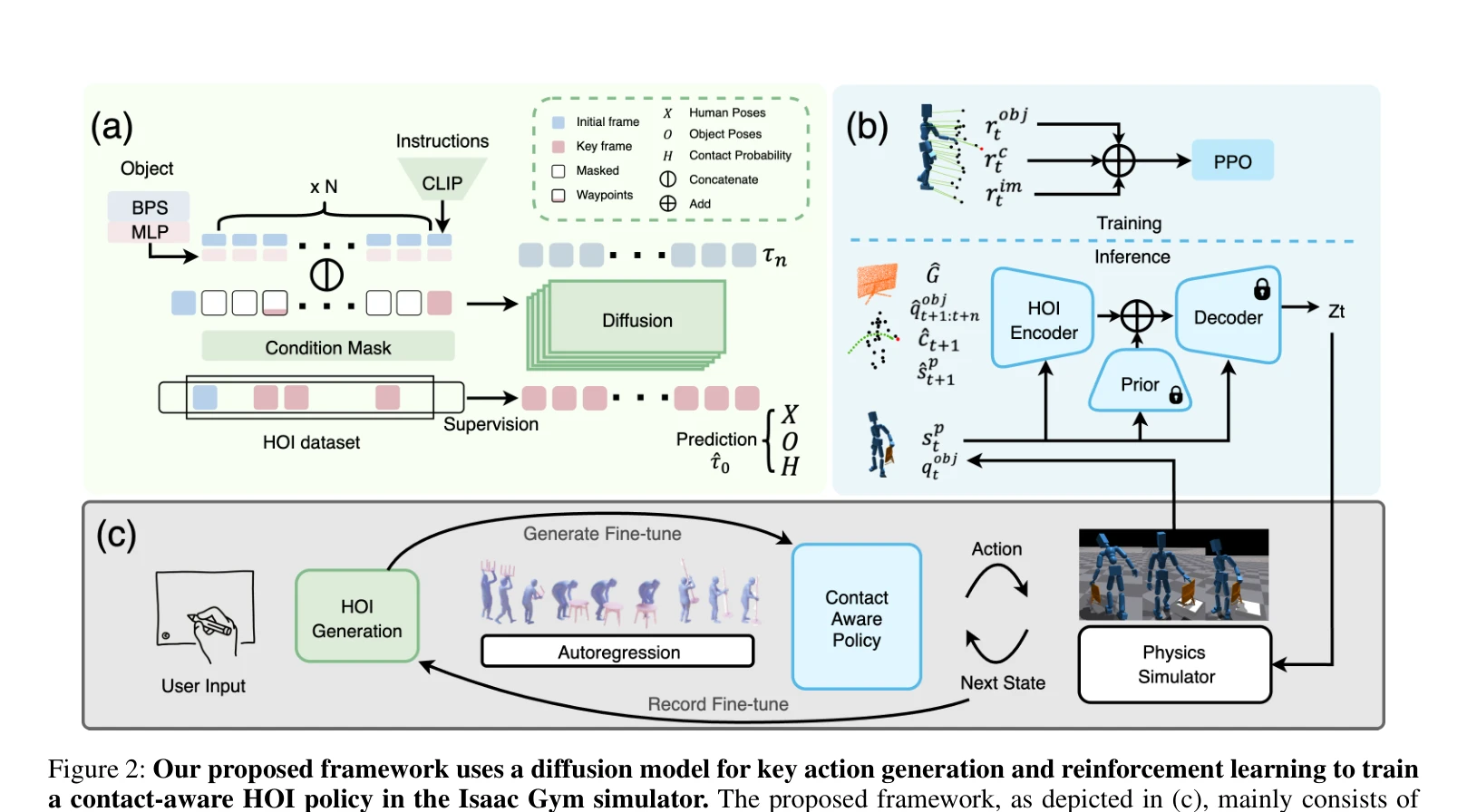
Figure 2: Our proposed framework uses a diffusion model for key action generation and reinforcement learning to train
SimGenHOI는 Diffusion Transformers 기반의 생성 모델과 강화학습 기반의 접촉-인식 제어 정책을 결합하여 물리적으로 현실적인 인간형 로봇-객체 상호작용을 생성하는 통합 프레임워크이다. 상호 미세조정 전략을 통해 생성 모델과 제어 정책이 반복적으로 서로를 개선하여 장기 조작 과제의 성공률을 높인다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 생성 모델과 강화학습의 상호 보완적 강점을 효과적으로 결합하여 물리적으로 현실적인 장기 인간형 로봇-객체 상호작용 생성이라는 중요한 문제를 해결하였다. 특히 상호 미세조정 전략과 key action 기반 패러다임은 높은 독창성을 보여주며, 광범위한 실험을 통해 방법의 효과를 입증했으나 sim-to-real 검증이 부족한 점이 아쉽다.