Essence
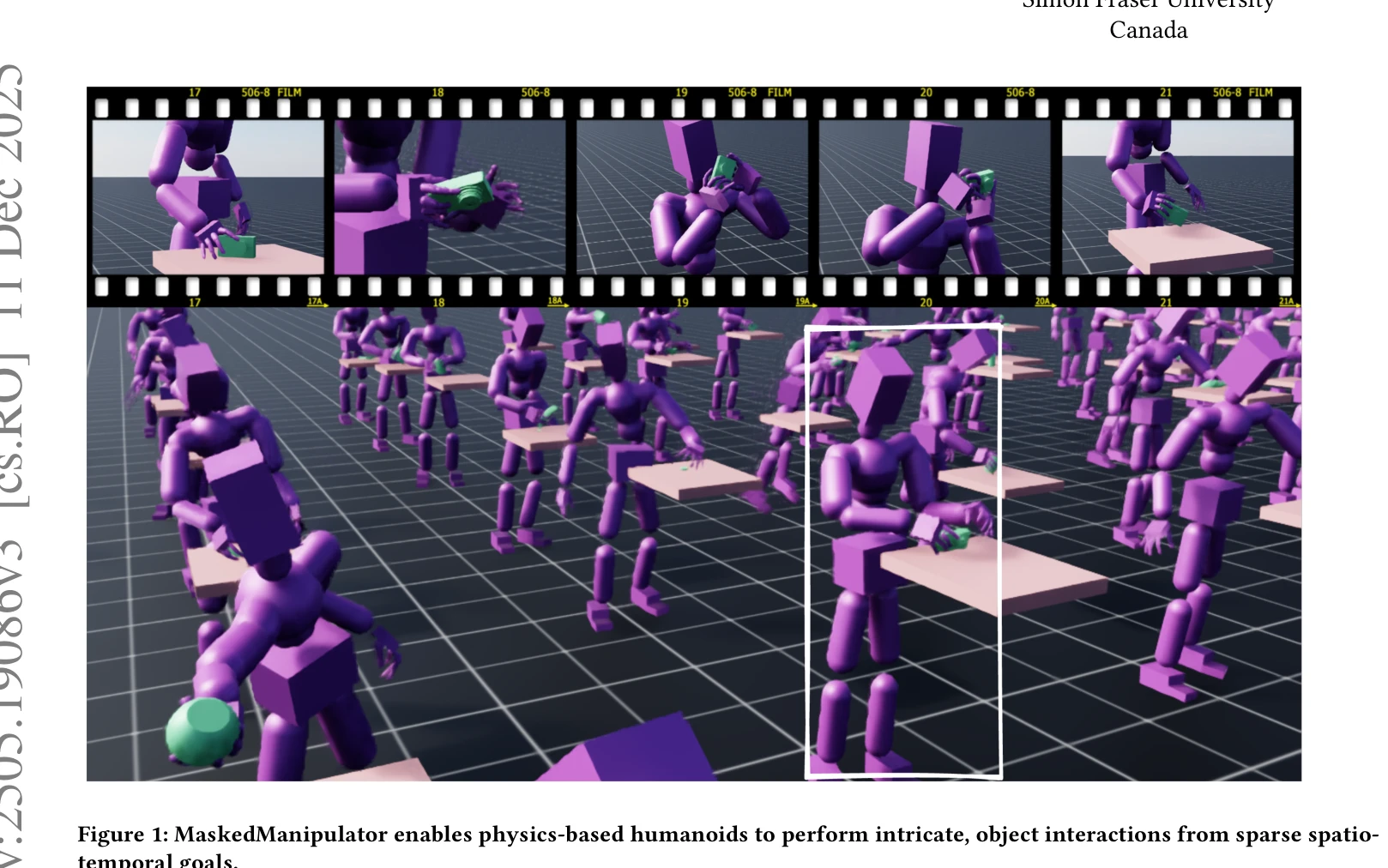
Figure 1: MaskedManipulator enables physics-based humanoids to perform intricate, object interactions from sparse spatio
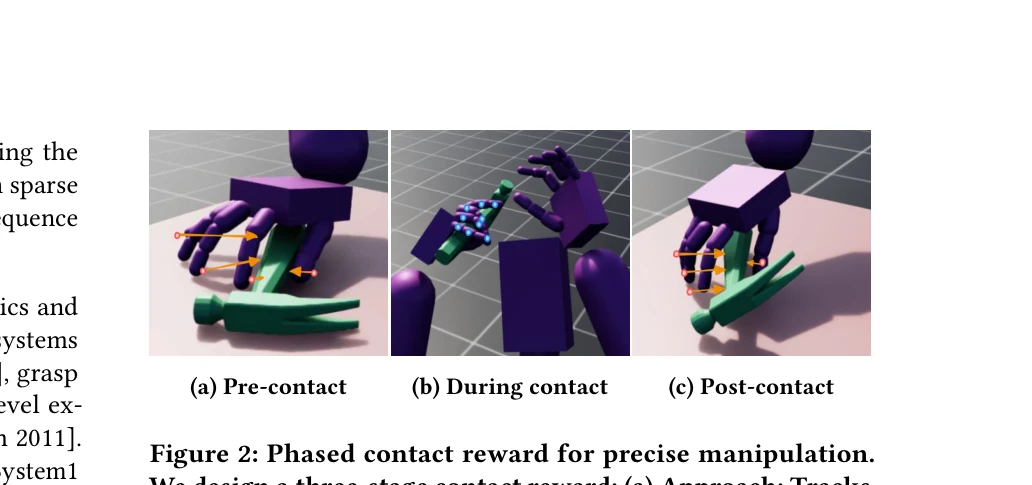
MaskedManipulator는 대규모 모션 캡처 데이터로 학습한 추적 컨트롤러에서 증류한 생성적 제어 정책으로, 사용자가 객체 포즈나 신체 포즈 같은 고수준 목표를 지정하여 물리 기반 전신 조작 행동을 생성한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: MaskedManipulator는 두 단계 증류 프레임워크를 통해 정교한 물리 기반 전신 조작을 희소한 고수준 목표로 제어 가능하도록 함으로써, 캐릭터 애니메이션과 인간형 로봇 제어 분야의 중요한 진전을 이룬다. 대규모 모션 캡처 데이터 활용과 유연성-정밀도 균형 달성이 특히 주목할 만하나, 실제 로봇 적용 평가와 일반화 성능 분석이 보완되면 더욱 완성도 높은 기여가 될 것이다.