저자: Zhi Su, Bike Zhang, Nima Rahmanian, Yuman Gao, Qiayuan Liao, Caitlin Regan, Koushil Sreenath, S. Shankar Sastry | 날짜: 2025-09-04 | DOI: 10.48550/arXiv.2508.21043 📄 PDF
Essence
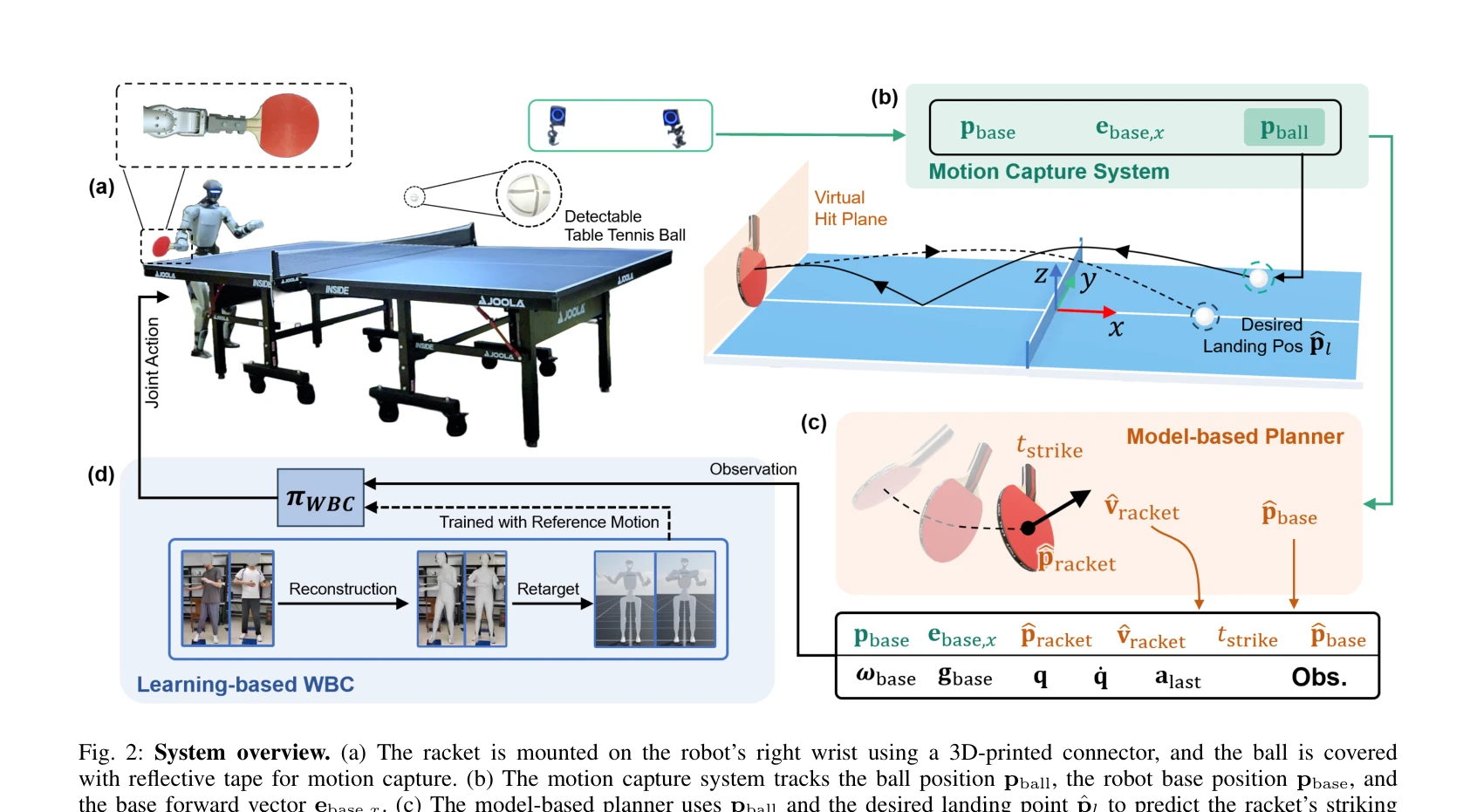
Fig. 2: System overview. (a) The racket is mounted on the robot’s right wrist using a 3D-printed connector, and the ball
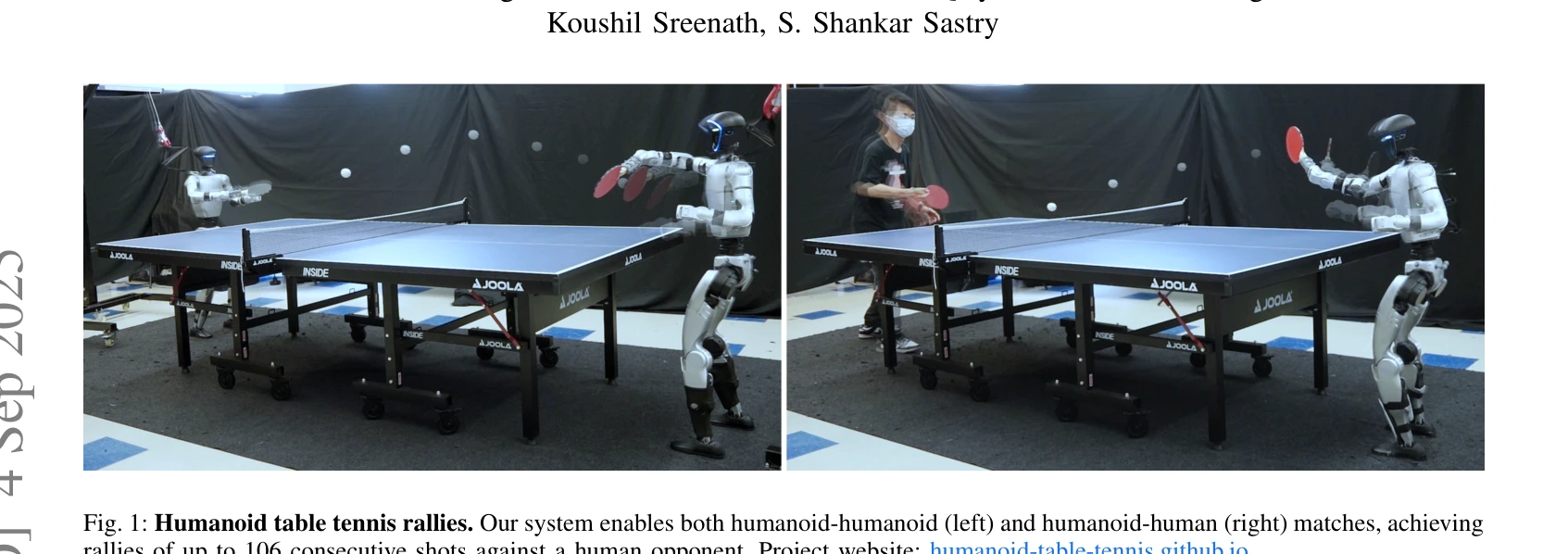
휴머노이드 로봇이 탁구를 하기 위한 계층적 프레임워크를 제시하며, model-based planner와 RL 기반 whole-body controller를 통합하여 sub-second 반응 시간 내에 초당 5 m/s 이상의 볼을 처리한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 humanoid table tennis를 통해 고속 동적 환경에서의 전신 제어 및 상호작용을 처음으로 성공적으로 시연하였으며, 계층적 planning-control 통합과 minimal human references를 통한 우아한 접근법이 인상적이다. 실제 세계 검증(106 연속 샷)은 방법론의 실용성을 강력히 입증한다.