Essence
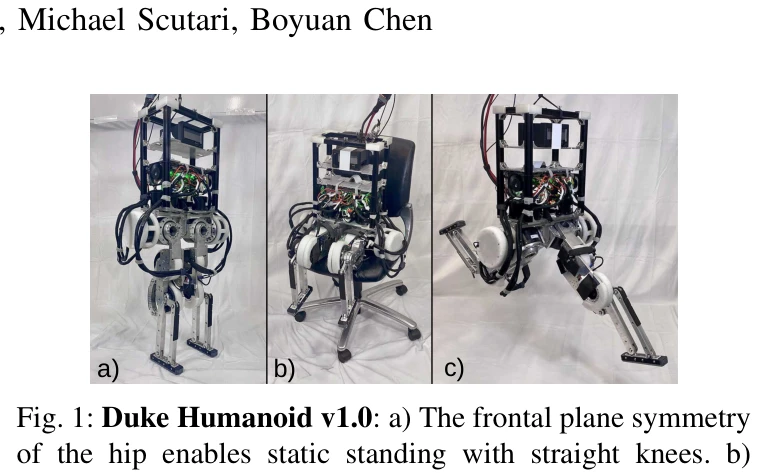
Fig. 1: Duke Humanoid v1.0: a) The frontal plane symmetry
Duke Humanoid은 동적 보행이 가능한 오픈소스 10-DoF 인형로봇으로, 패시브 다이내믹스를 활용하는 reinforcement learning 정책을 통해 에너지 효율적인 이족 보행을 달성한다.
저자: Boxi Xia, Bokuan Li, Jacob Lee, Michael Scutari, Boyuan Chen | 날짜: 2024-09-29 | URL: https://arxiv.org/abs/2409.19795 📄 PDF
Fig. 1: Duke Humanoid v1.0: a) The frontal plane symmetry
Duke Humanoid은 동적 보행이 가능한 오픈소스 10-DoF 인형로봇으로, 패시브 다이내믹스를 활용하는 reinforcement learning 정책을 통해 에너지 효율적인 이족 보행을 달성한다.
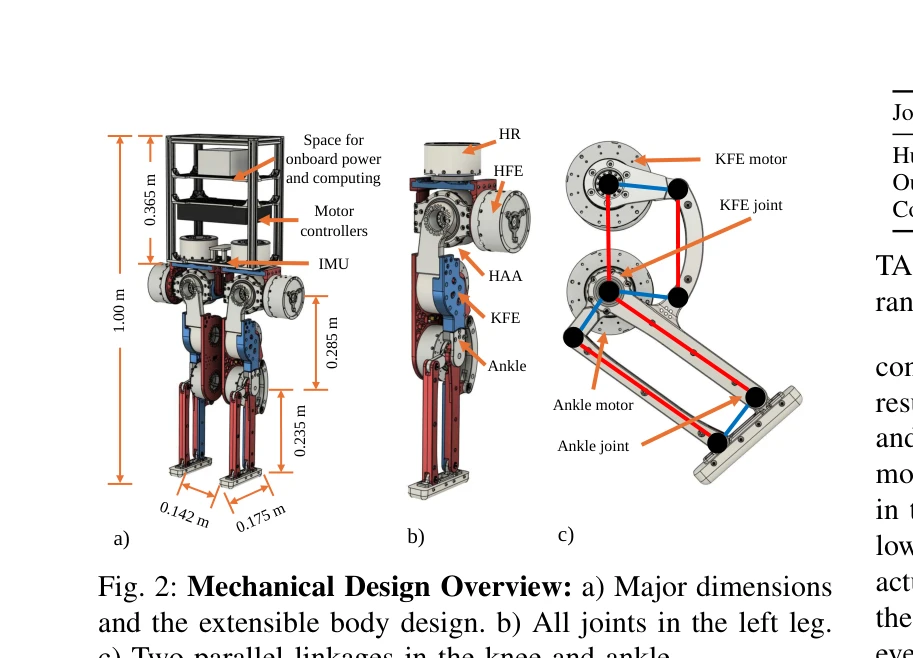
Fig. 2: Mechanical Design Overview: a) Major dimensions
Fig. 2: Mechanical Design Overview: a) Major dimensions
총평: 이 논문은 오픈소스 인형로봇 플랫폼과 패시브 다이내믹스 기반 에너지 효율 개선을 결합하여 humanoid 보행 연구에 실질적 기여를 한다. 특히 reinforcement learning 내 passive dynamics의 명시적 활용과 zero-shot 배포 검증은 학술적·실용적 가치가 높으나, 속도 범위와 일반화 능력의 검증이 더 필요하다.