Achievement
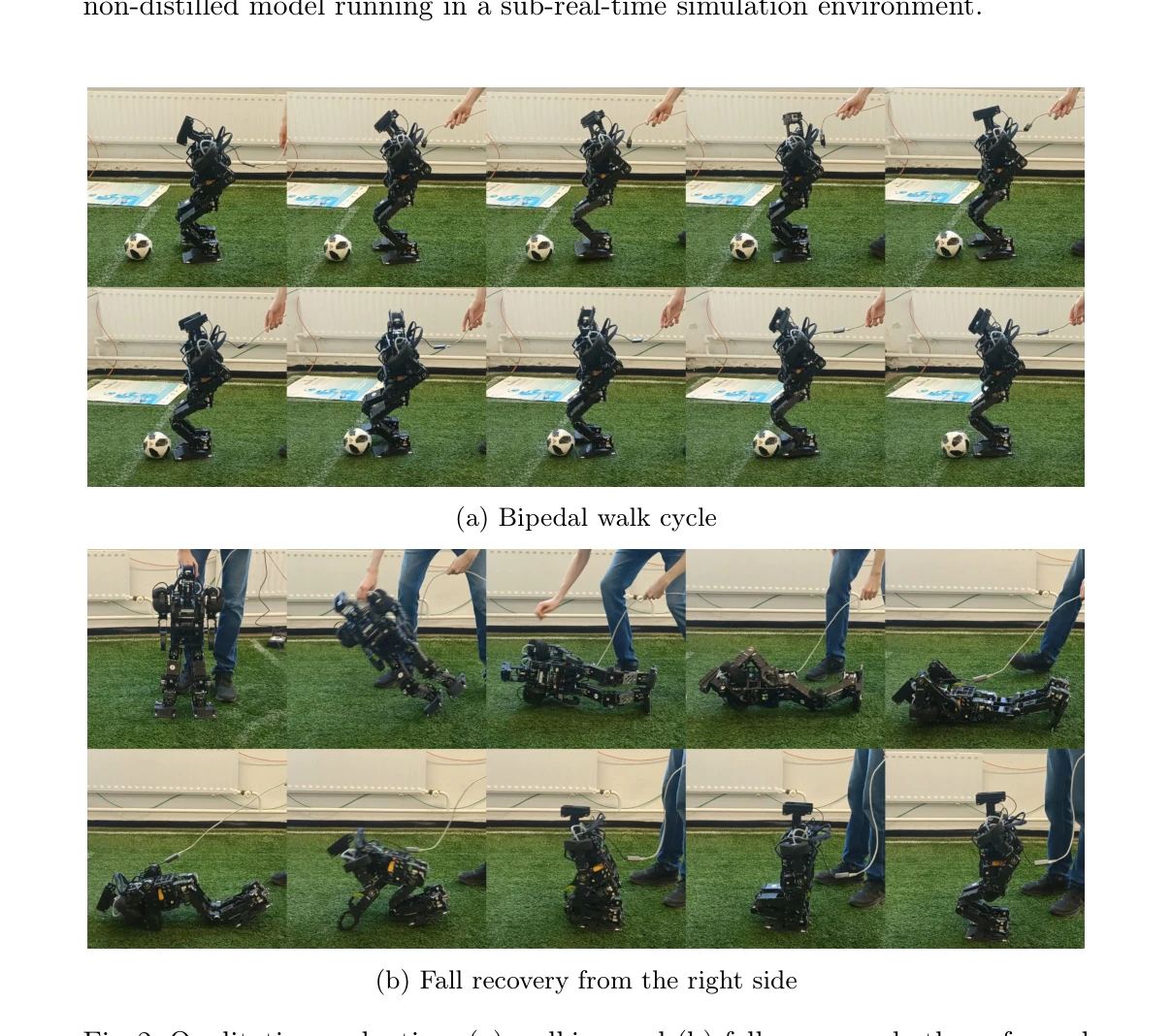
Fig. 2: Qualitative evaluation: (a) walking and (b) fall recovery, both performed
- 데이터 수집 및 전처리: RoboCup 2024 및 German Open 2025에서 88개 녹화, 약 15시간의 실제 경기 데이터 확보 및 동기화된 multi-modal 전처리 완성
- 모델 개발: transformer 기반 diffusion model로 walking, kicking, fall recovery 등 복잡한 운동 행동 학습 가능 입증
- 실시간 추론 실현: distillation 기법으로 diffusion 단계를 다중에서 단일 단계로 축소하여 embedded platform에서 실시간 실행 가능
- 시뮬레이션 및 물리 로봇 검증: 학습된 행동이 시뮬레이션과 실제 로봇 모두에서 복제 가능함을 실증
- 커뮤니티 기여: 데이터셋, 사전 학습 모델, 코드 공개로 향후 연구(RL, preference optimization) 기반 제공