Essence
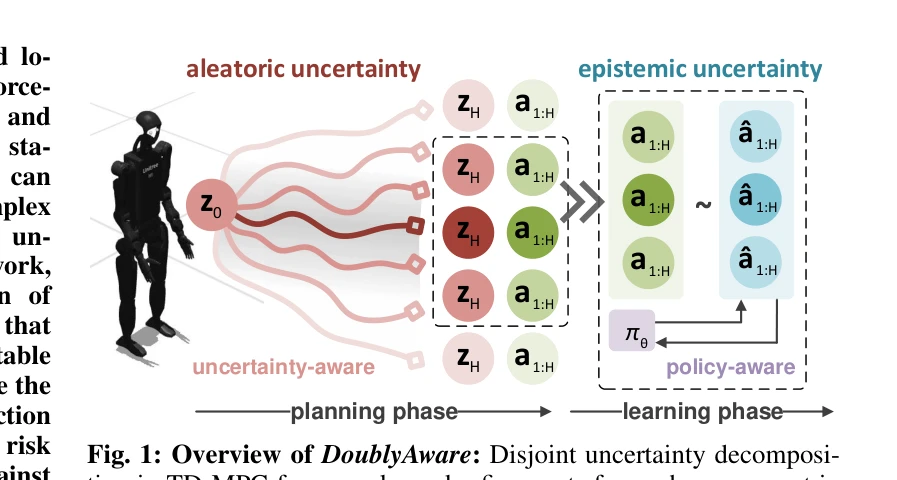
Fig. 1: Overview of DoublyAware: Disjoint uncertainty decomposi-
DoublyAware는 TD-MPC 프레임워크에서 불확실성을 planning uncertainty와 policy uncertainty로 명시적으로 분해하여, conformal prediction과 Group-Relative Policy Constraint를 통해 휴머노이드 로봇의 샘플 효율적이고 안정적인 학습을 실현한다.
Evaluation
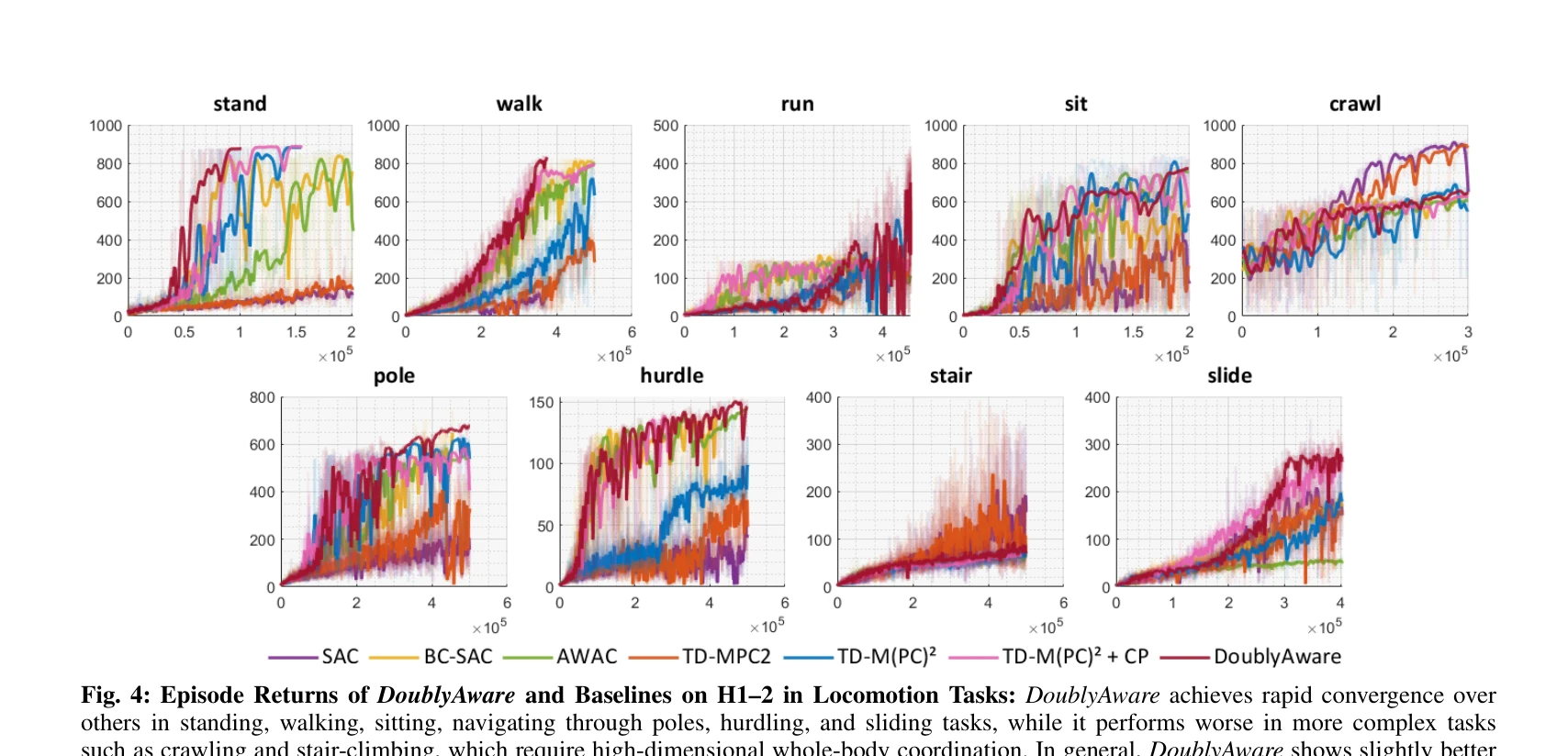
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 MBRL의 핵심 문제인 불확실성을 planning과 policy로 분해하고 각각에 맞는 엄밀한 해법(conformal prediction, GRPC)을 제시함으로써 개념적 명확성과 기술적 우수성을 동시에 달성했다. 휴머노이드 로봇 제어라는 도전적 문제에서 실증적 개선을 보여주었으나, 실제 로봇 검증과 계산 비용 분석이 보완되면 더욱 강력한 기여가 될 것으로 판단된다.