Essence
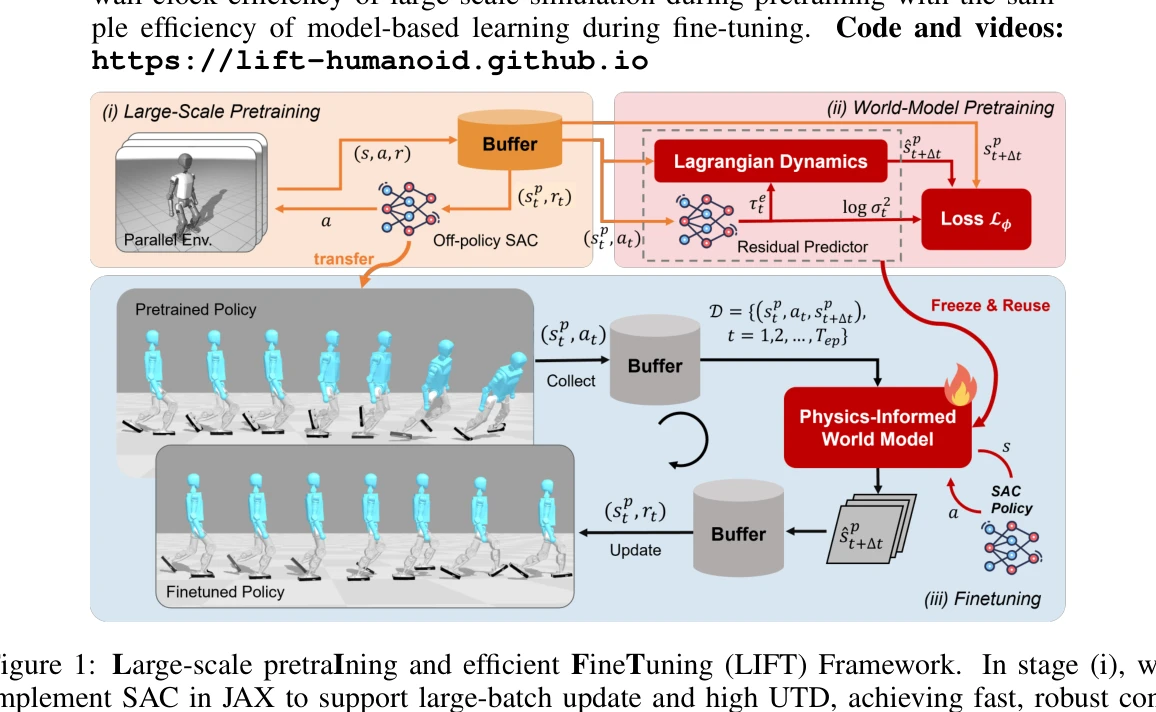
Figure 1: Large-scale pretraIning and efficient FineTuning (LIFT) Framework. In stage (i), we
대규모 병렬 시뮬레이션에서 SAC 기반 정책 사전학습과 물리-정보 기반 세계 모델을 활용한 효율적 미세조정을 결합하여 휴머노이드 로봇의 시뮬-투-리얼 전이와 안전한 적응을 실현한다.
저자: Weidong Huang, Zhehan Li, Hangxin Liu, Biao Hou, Yao Su, Jingwen Zhang | 날짜: 2026-01-29 | URL: https://arxiv.org/abs/2601.21363 📄 PDF
Figure 1: Large-scale pretraIning and efficient FineTuning (LIFT) Framework. In stage (i), we
대규모 병렬 시뮬레이션에서 SAC 기반 정책 사전학습과 물리-정보 기반 세계 모델을 활용한 효율적 미세조정을 결합하여 휴머노이드 로봇의 시뮬-투-리얼 전이와 안전한 적응을 실현한다.
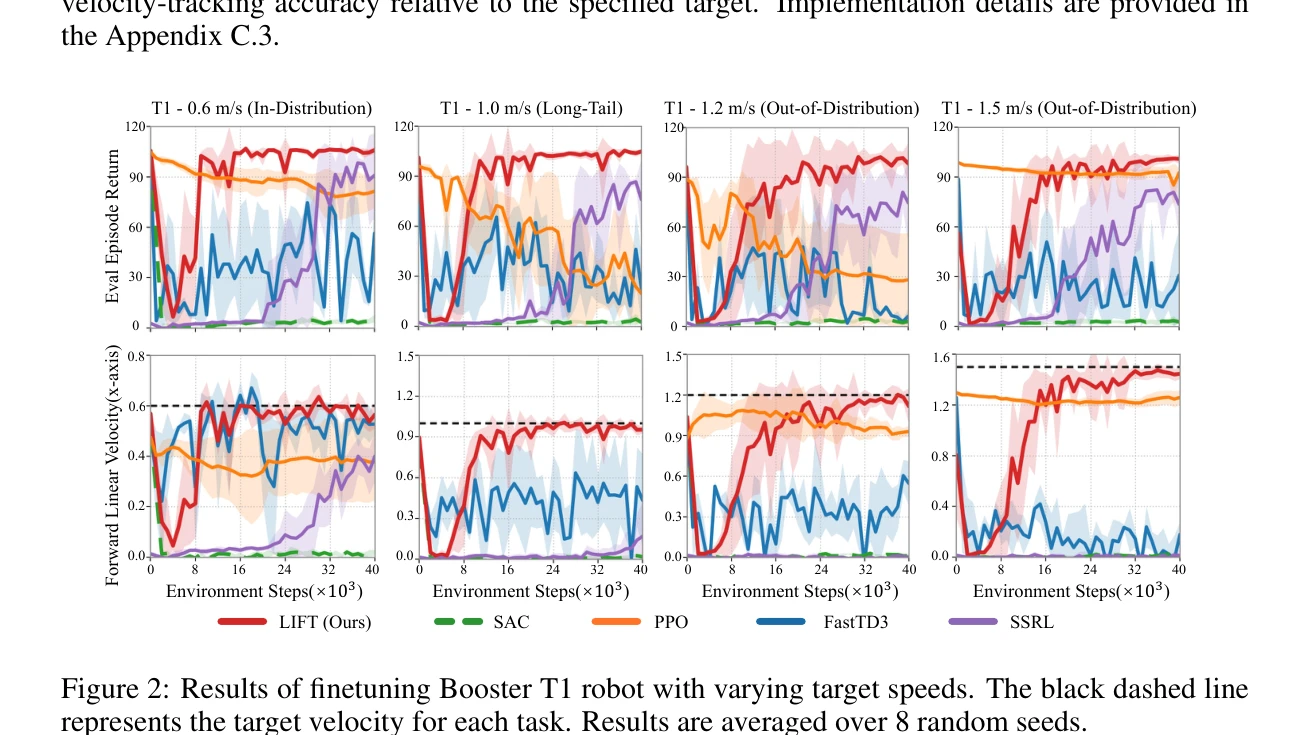
Figure 2: Results of finetuning Booster T1 robot with varying target speeds. The black dashed line
확장 가능한 SAC 구현: JAX 기반 SAC가 대규모 병렬 시뮬레이션에서 강력한 수렴을 지원하고 단일 NVIDIA RTX 4090에서 1시간 내에 실제 휴머노이드 로봇으로의 무샷 배포 달성
안전하고 효율적인 미세조정 전략: 결정적 정책 실행과 세계 모델 내 확률적 탐색 분리를 통해 적응 중 위험성 완화 및 샘플 효율성 개선
공개 소스 파이프라인: 사전학습, 무샷 배포, 미세조정을 아우르는 통합 휴머노이드 제어 파이프라인 공개
Figure 1: Large-scale pretraIning and efficient FineTuning (LIFT) Framework. In stage (i), we
총평: 본 논문은 대규모 시뮬레이션 효율성과 샘플-효율적 적응을 효과적으로 결합하고, 안전성을 강조한 미세조정 전략으로 휴머노이드 제어의 실질적 도전을 해결한다. 실로봇 검증과 공개 코드는 로보틱스 커뮤니티에 즉시 활용 가능한 기초를 제공한다.