저자: Zhengyi Luo, Ye Yuan, Tingwu Wang, Chenran Li, Sirui Chen, Fernando Castañeda, Zi-Ang Cao, Jiefeng Li, David Minor, Qingwei Ben, Xingye Da, Runyu Ding, Cyrus Hogg, Lina Song, Edy Lim, Eugene Jeong, Tairan He, Haoru Xue, Wenli Xiao, Zi Wang, Simon Yuen, Jan Kautz, Yan Chang, Umar Iqbal, Linxi "Jim" Fan, Yuke Zhu | 날짜: 2025-12-04 | DOI: 10.48550/arXiv.2511.07820 📄 PDF
Essence
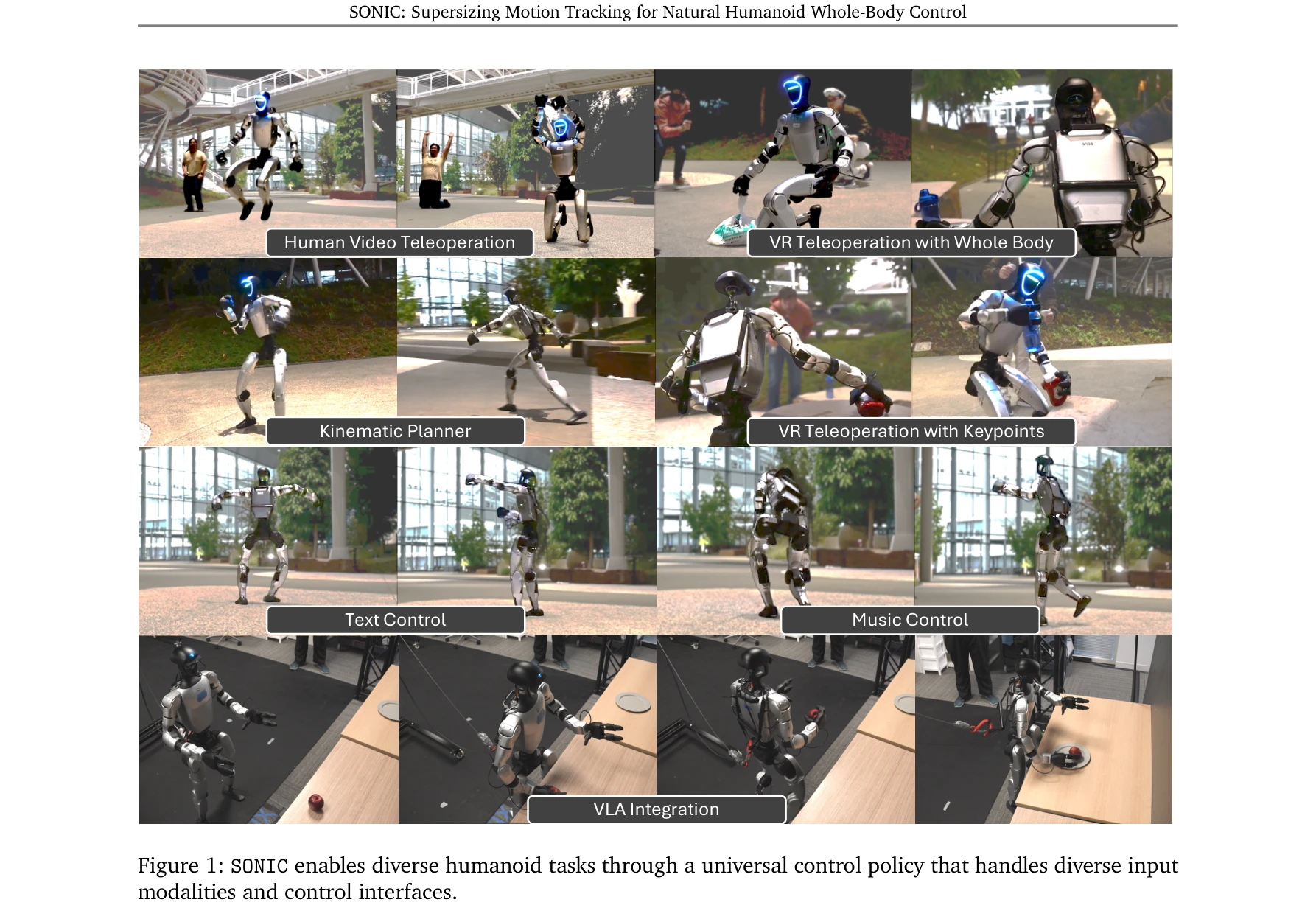
Figure 1: SONIC enables diverse humanoid tasks through a universal control policy that handles diverse input
인간의 모션 캡처 데이터를 활용한 motion tracking을 기반 작업으로 삼아 42M 파라미터의 대규모 humanoid controller를 학습하고, kinematic planner와 unified token space를 통해 다양한 제어 인터페이스를 지원하는 자연스러운 전신 움직임 제어 시스템을 제시한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 이 논문은 humanoid control에 대규모 스케일링을 성공적으로 적용한 첫 사례로, motion tracking을 foundation task로 선정하고 100M 프레임 데이터와 42M 파라미터로 학습하여 강력한 generalization을 보인다. Kinematic planner와 unified token space를 통해 다양한 제어 인터페이스를 단일 정책으로 통합함으로써 실제 응용 가능성을 입증했으며, 체계적인 ablation과 comprehensive evaluation은 연구의 엄밀성을 보강한다.