Essence
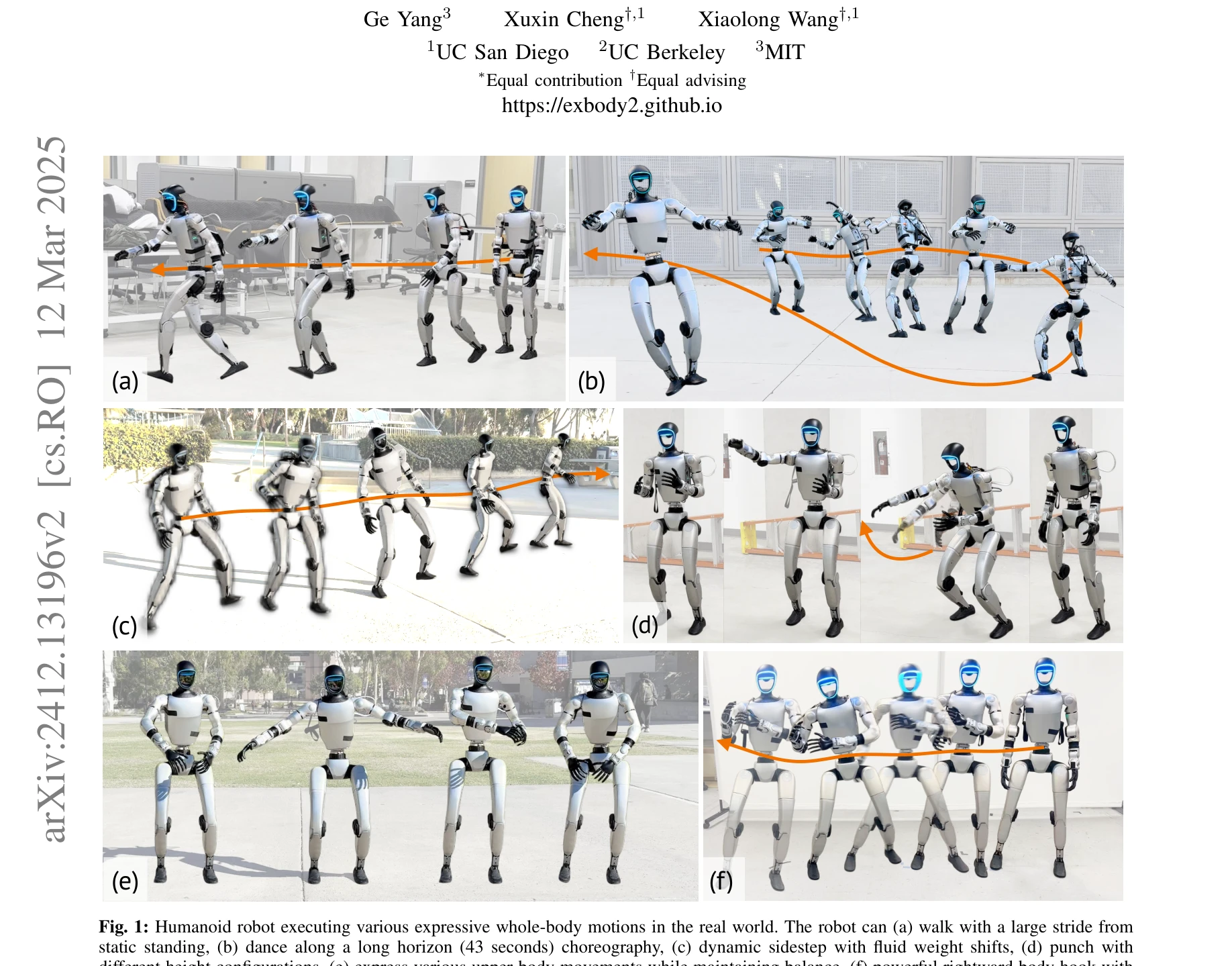
Fig. 1: Humanoid robot executing various expressive whole-body motions in the real world. The robot can (a) walk with a
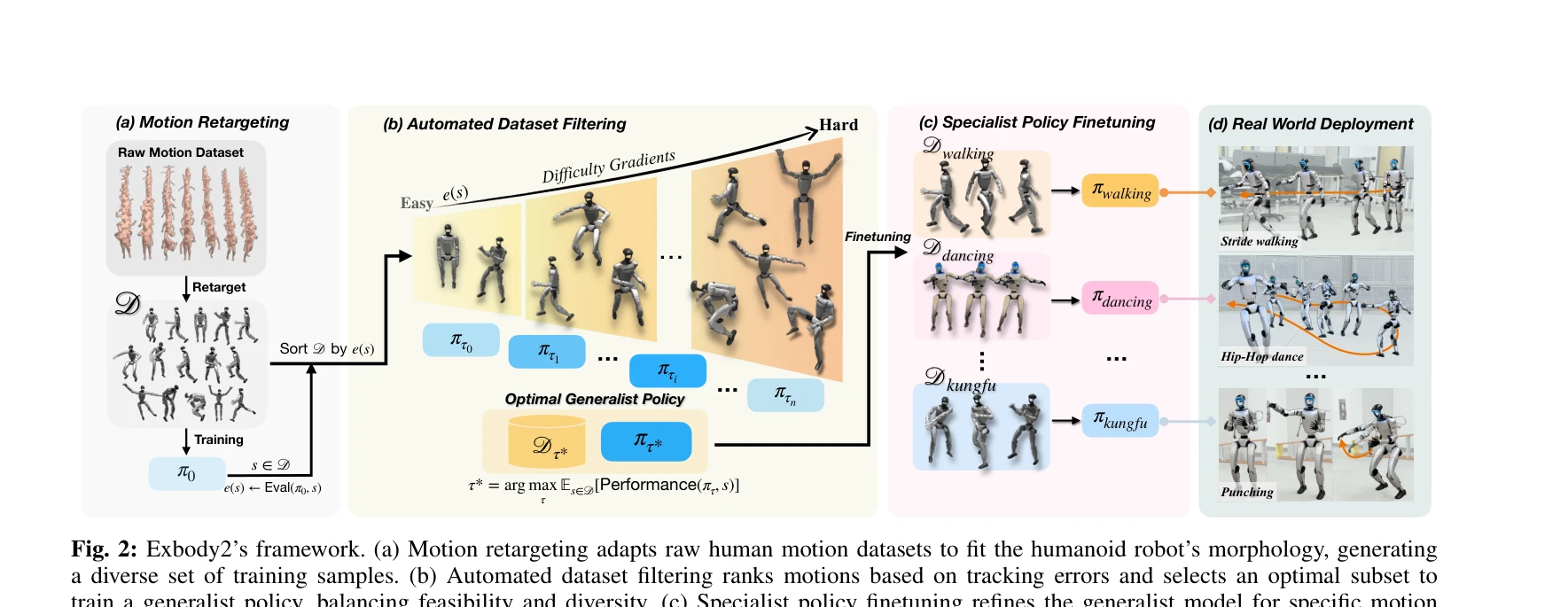
ExBody2는 휴머노이드 로봇이 인간의 모션 캡처 데이터와 시뮬레이션 데이터를 학습하여 표현력 있는 전신 동작을 수행하도록 하는 프레임워크이며, 자동화된 데이터 필터링과 teacher-student 기반의 decoupled motion-velocity 제어 전략을 통해 실제 로봇에 배포 가능하게 함.