저자: Tao Huang, Huayi Wang, Junli Ren, Kangning Yin, Zirui Wang, Xiao Chen, Feiyu Jia, Wentao Zhang, Junfeng Long, Jingbo Wang, Jiangmiao Pang | 날짜: 2025-10-16 | DOI: 10.48550/arXiv.2510.14454 📄 PDF
Essence
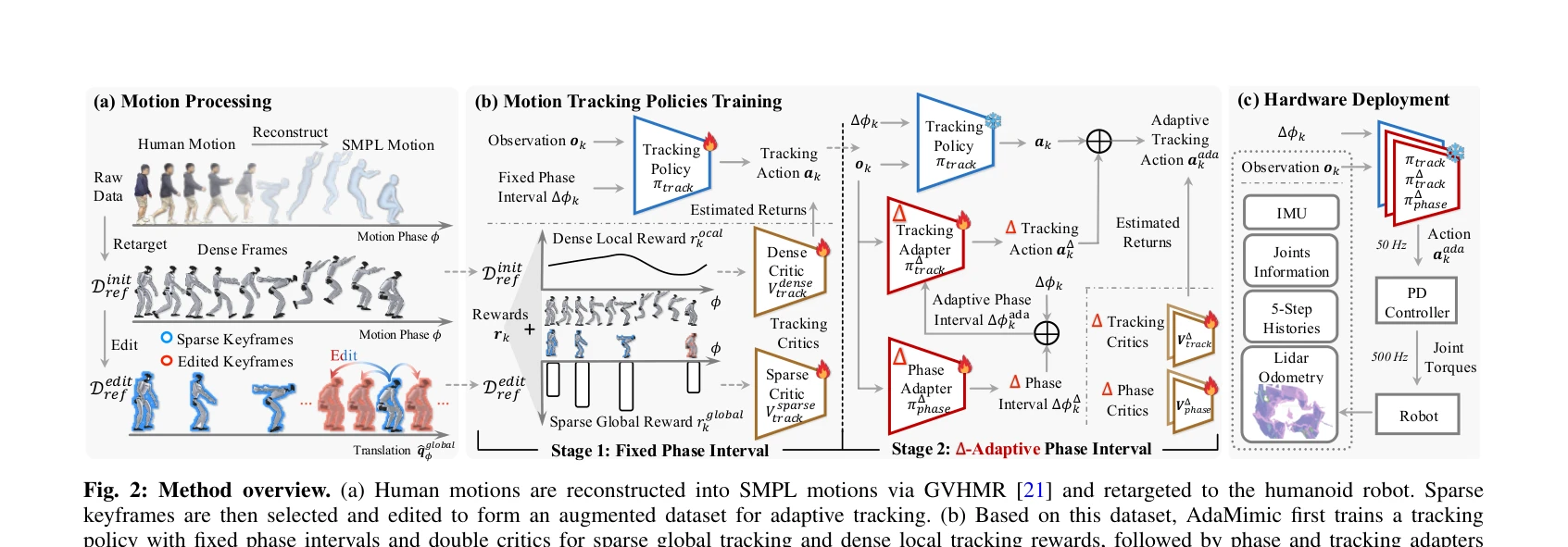
Fig. 2: Method overview. (a) Human motions are reconstructed into SMPL motions via GVHMR [21] and retargeted to the huma
AdaMimic은 단일 참조 동작으로부터 휴머노이드 로봇의 적응형 제어를 가능하게 하는 동작 추적 알고리즘으로, 키프레임 기반 데이터 증강과 단계적 어댑터 학습을 통해 정확한 모방과 광범위한 적응성을 동시에 달성한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: AdaMimic은 단일 참조 동작으로부터 고정밀 모방과 광범위 적응성을 동시에 달성하는 혁신적 접근으로, 두 단계 학습과 이중 어댑터 구조의 새로운 설계가 의미 있으며, 실제 로봇에서의 광범위한 검증이 제시되어 실용성이 높다.
