Essence
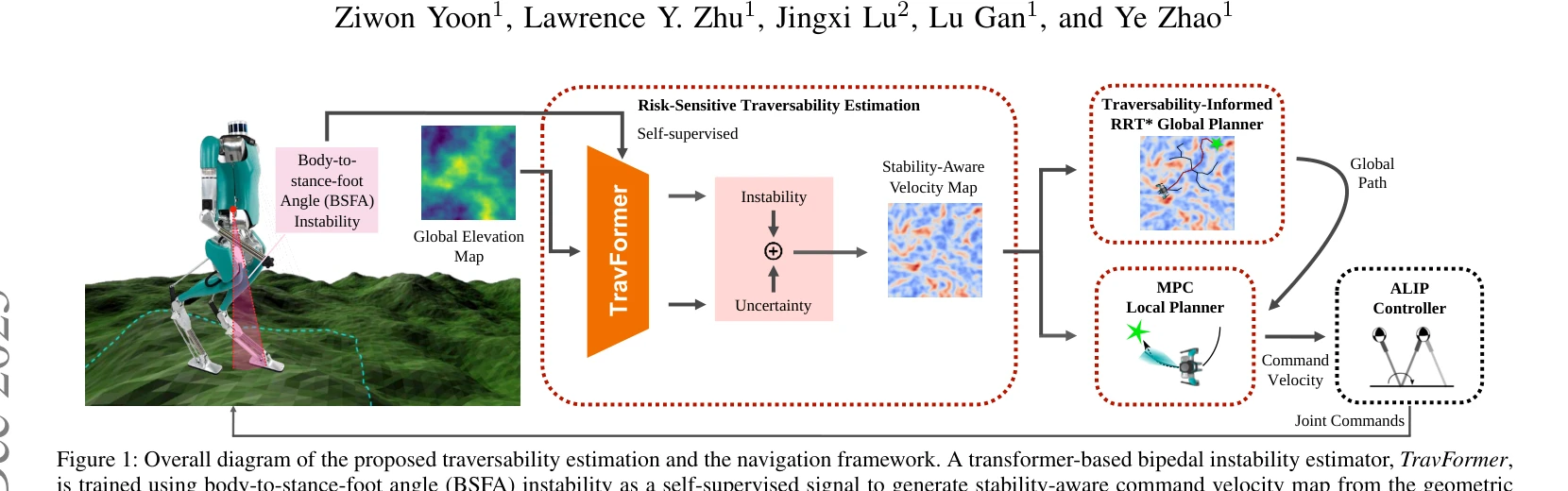
Figure 1: Overall diagram of the proposed traversability estimation and the navigation framework. A transformer-based bi
이족 로봇의 불안정성을 예측하는 TravFormer 신경망을 개발하고, 안정성 기반 명령 속도를 traversability로 정의하여 거친 지형에서의 안전하고 효율적인 네비게이션을 실현한다.
저자: Ziwon Yoon, Lawrence Y. Zhu, Jingxi Lu, Lu Gan, Ye Zhao | 날짜: 2025-06-01 | URL: https://arxiv.org/abs/2506.01046 📄 PDF
Figure 1: Overall diagram of the proposed traversability estimation and the navigation framework. A transformer-based bi
이족 로봇의 불안정성을 예측하는 TravFormer 신경망을 개발하고, 안정성 기반 명령 속도를 traversability로 정의하여 거친 지형에서의 안전하고 효율적인 네비게이션을 실현한다.
Figure 1: Overall diagram of the proposed traversability estimation and the navigation framework. A transformer-based bi
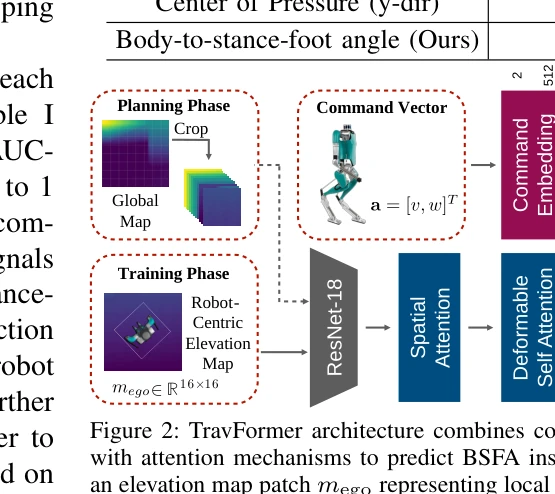
Figure 2: TravFormer architecture combines convolutional feature extraction
총평: 이 논문은 이족 로봇의 안정성 기반 traversability 추정이라는 중요하면서도 미개척된 문제를 처음 체계적으로 다루며, BSFA 특성 식별부터 TravFormer 개발, 계층적 네비게이션 프레임워크까지 일관된 기술적 기여를 제시한다. 시뮬레이션과 실제 로봇 실험을 통한 검증이 견고하고, 안정성 기반 속도 표현이라는 혁신적 설계로 가중치 재조정 문제를 해결하여 실용적 가치가 높다.