Essence
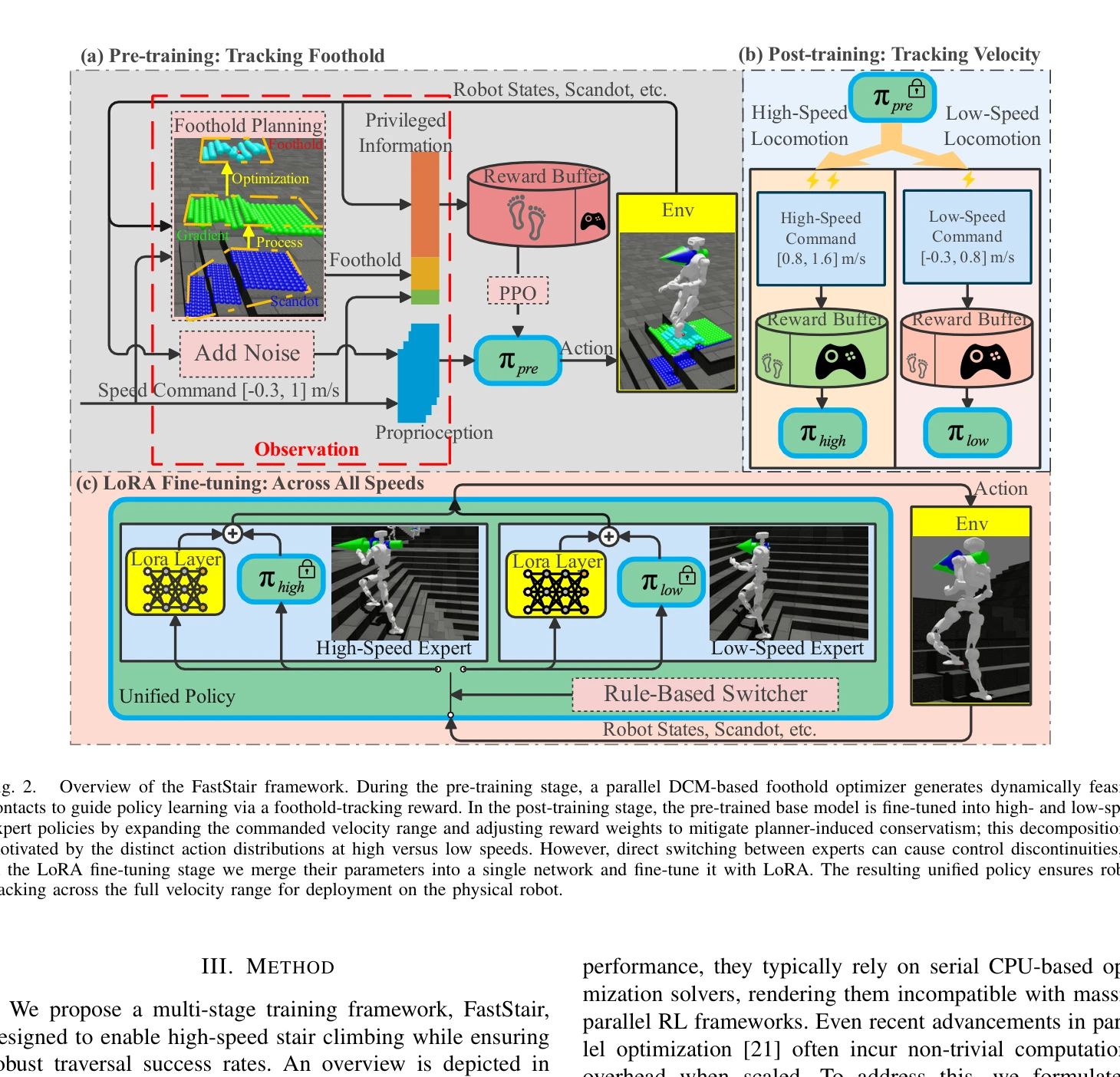
Fig. 2.
FastStair는 model-based foothold planner와 model-free RL을 통합하여 humanoid robot의 고속 계단 등반을 실현하는 다단계 학습 프레임워크이다. DCM 기반 planner로 탐색을 안내하고 speed-specialized experts와 LoRA를 통해 보수성을 완화한다.
저자: Yan Liu, Tao Yu, Haolin Song, Hongbo Zhu, Nianzong Hu, Yuzhi Hao, Xiuyong Yao, Xizhe Zang, Hua Chen, Jie Zhao | 날짜: 2026-01-15 | URL: https://arxiv.org/abs/2601.10365 📄 PDF
Fig. 2.
FastStair는 model-based foothold planner와 model-free RL을 통합하여 humanoid robot의 고속 계단 등반을 실현하는 다단계 학습 프레임워크이다. DCM 기반 planner로 탐색을 안내하고 speed-specialized experts와 LoRA를 통해 보수성을 완화한다.
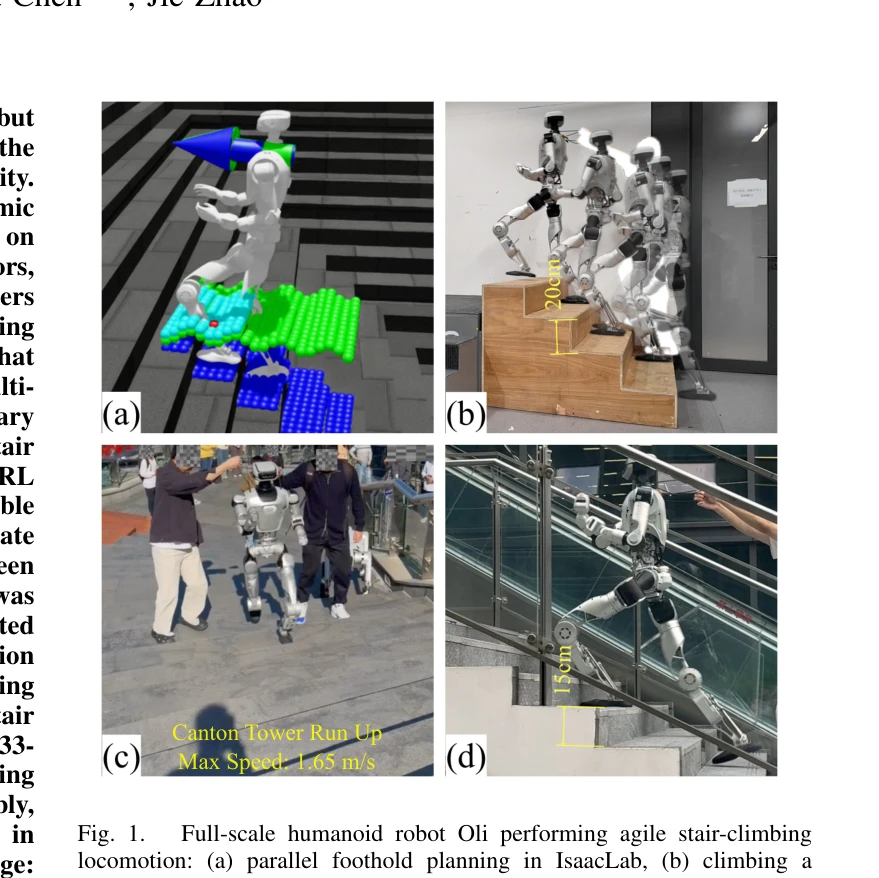
Fig. 1.
Fig. 2.
총평: FastStair는 model-based 안정성과 learning-based 민첩성의 근본적 상충을 다단계 학습과 LoRA 기반 통합으로 우아하게 해결한 혁신적 프레임워크이다. 실제 로봇 배포와 경쟁 우승으로 실용성이 입증되었다.