저자: Andrea Tirinzoni, Ahmed Touati, Jesse Farebrother, Mateusz Guzek, Anssi Kanervisto, Yingchen Xu, Alessandro Lazaric, Matteo Pirotta | 날짜: 2025-04-15 | URL: https://arxiv.org/abs/2504.11054 📄 PDF
Essence
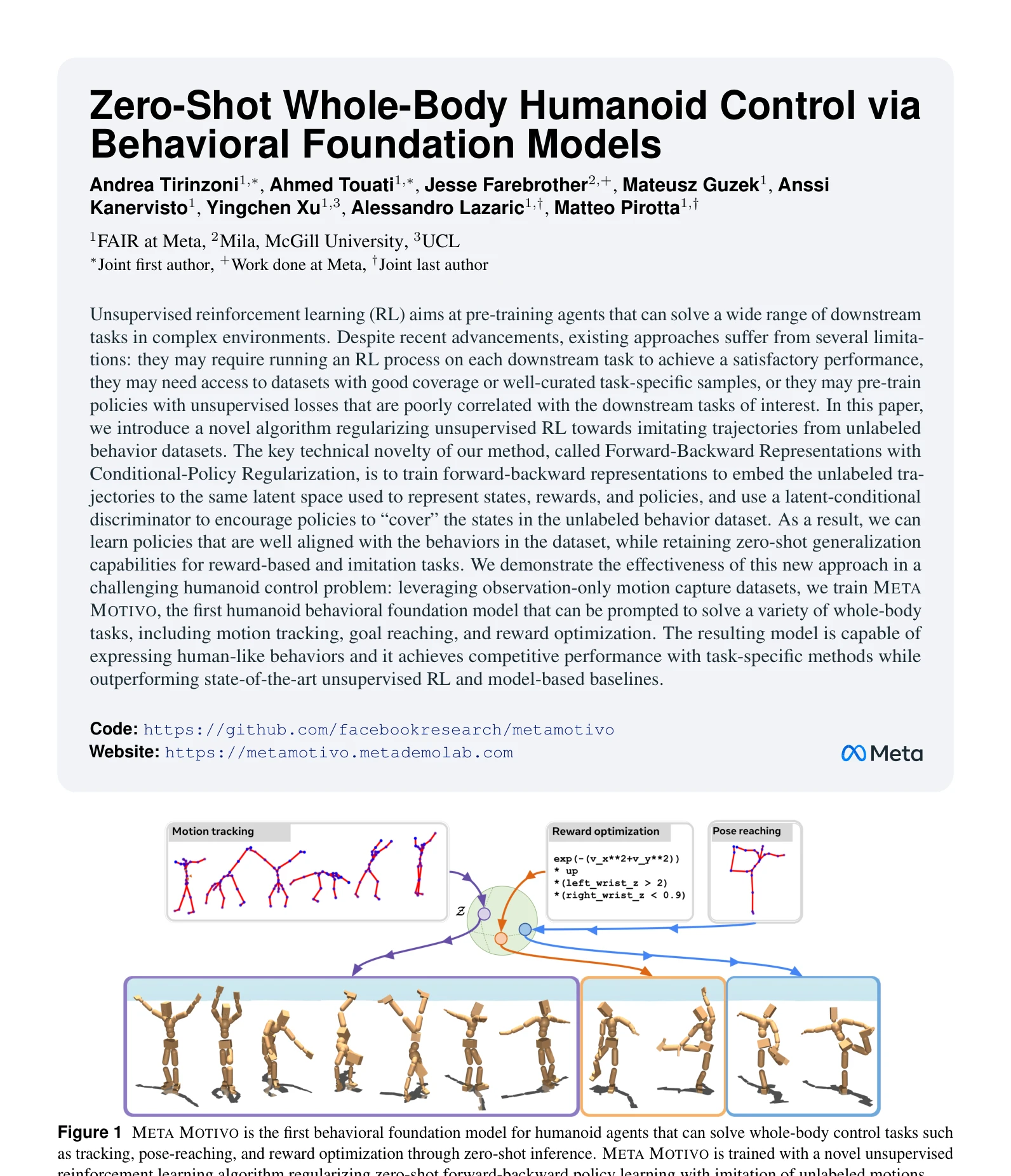
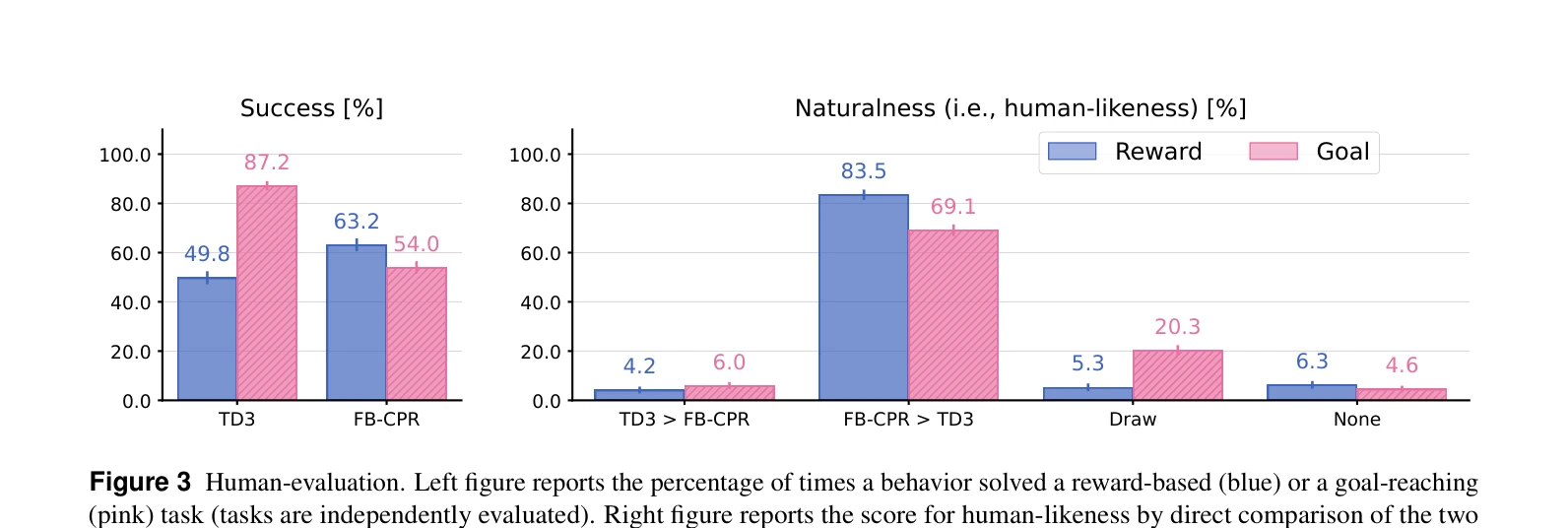
Figure 1 META MOTIVO is the first behavioral foundation model for humanoid agents that can solve whole-body control task
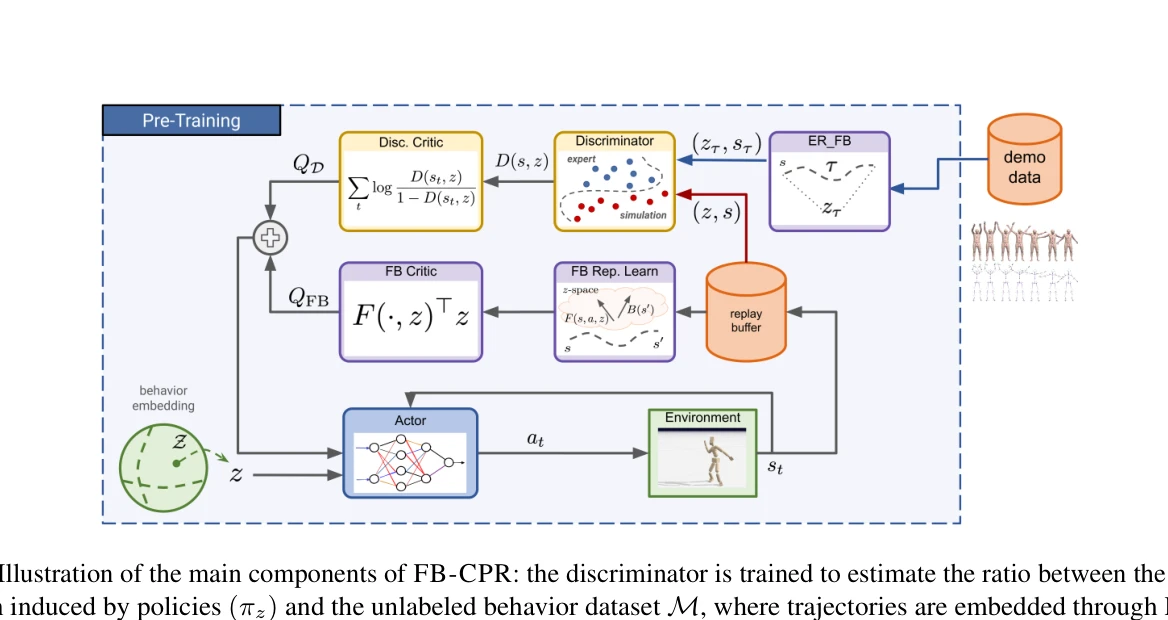
Forward-Backward representations with Conditional-Policy Regularization (FB-CPR)을 통해 unlabeled behavior dataset으로 unsupervised RL을 정규화하여, humanoid agent의 zero-shot whole-body control을 가능하게 하는 behavioral foundation model Meta Motivo를 개발했다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: FB-CPR은 unsupervised RL의 exploration 한계를 behavior dataset 정규화로 창의적으로 해결하고, 복잡한 humanoid 제어에서 zero-shot generalization을 달성한 기술적으로 견실하고 의미 있는 연구이다. 재현성 보장과 다양한 평가는 강점이나, 데이터셋 의존성과 실제 로봇 검증 부재는 향후 개선이 필요하다.