Essence
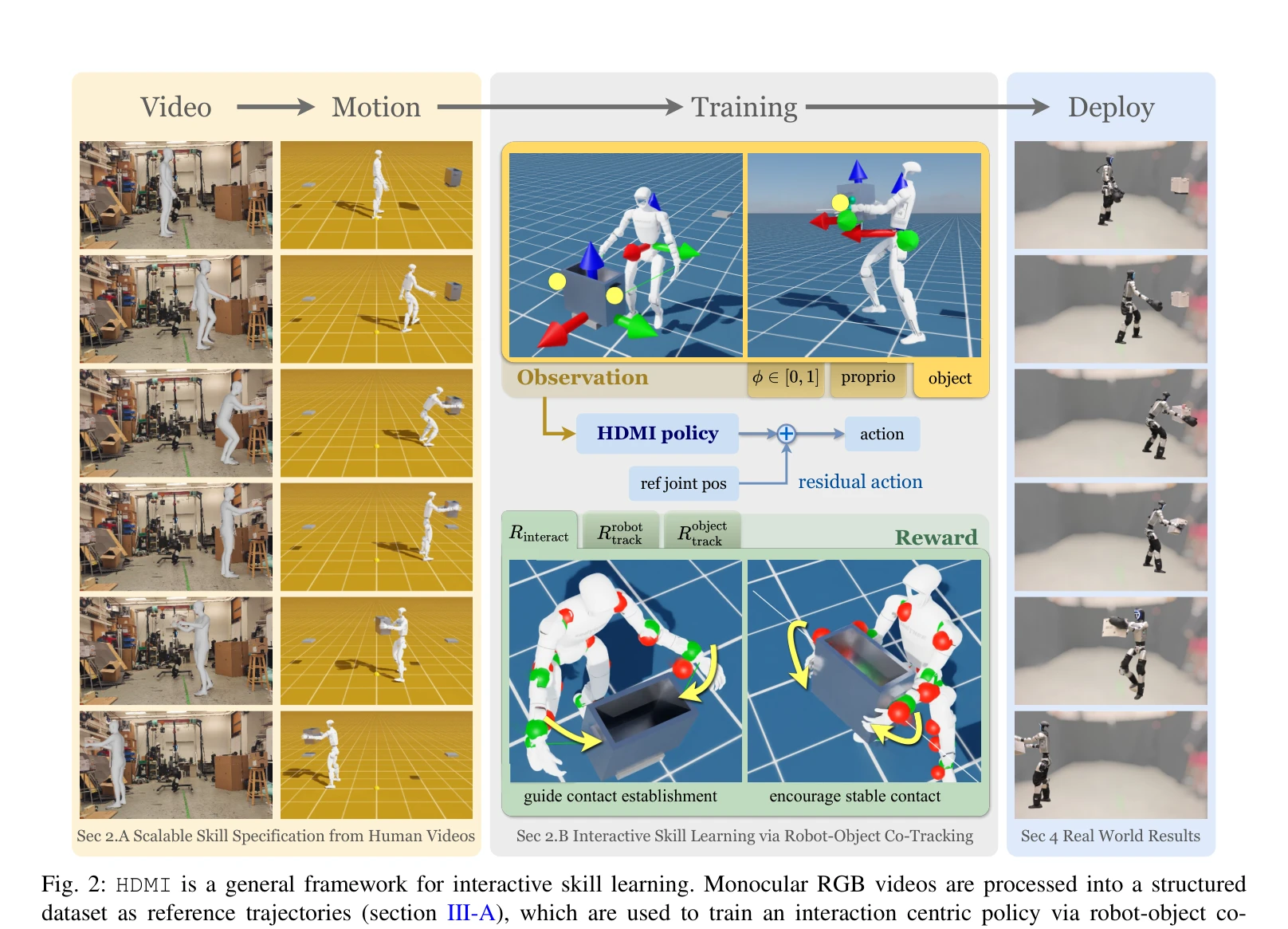
Fig. 2: HDMI is a general framework for interactive skill learning. Monocular RGB videos are processed into a structured
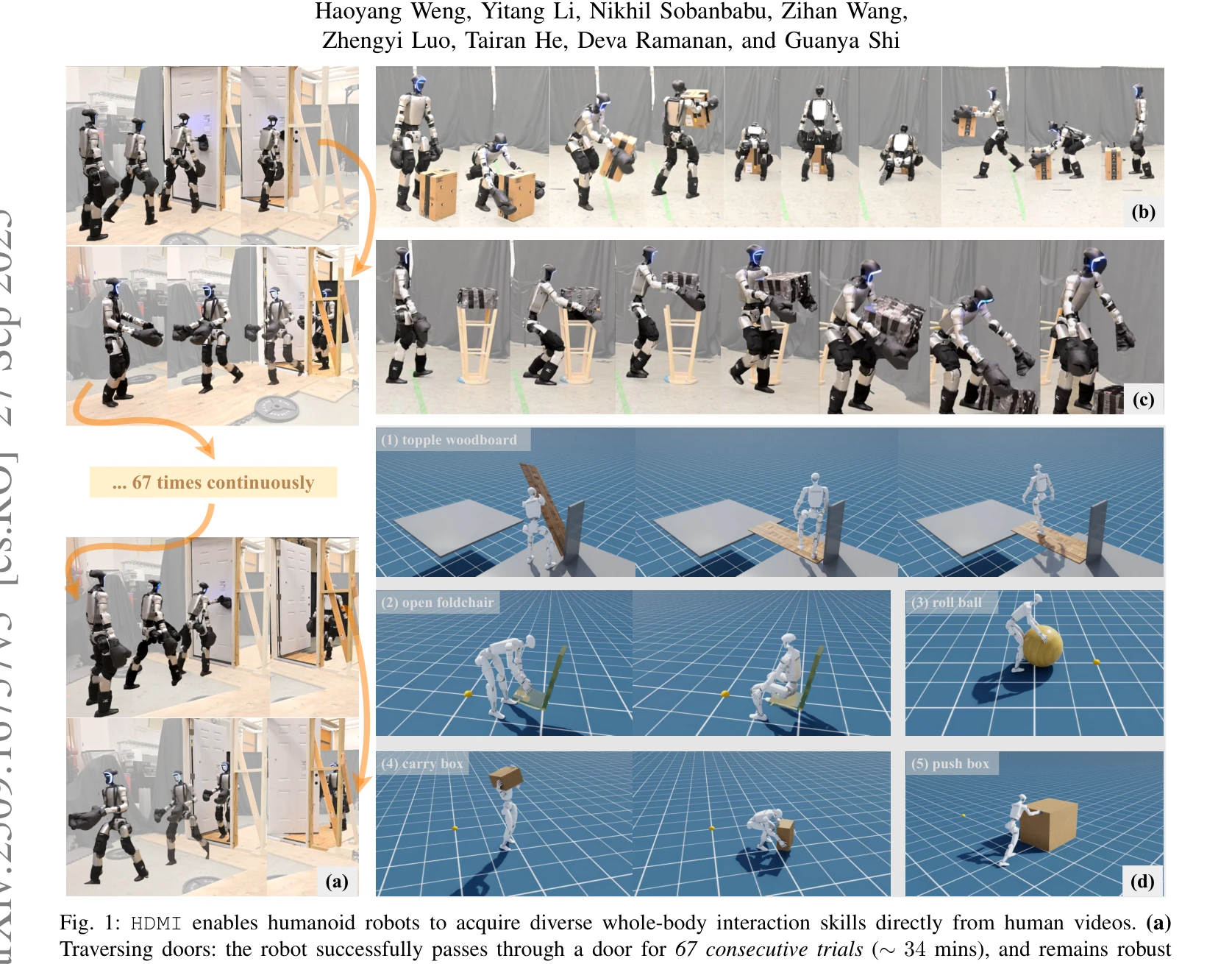
HDMI는 단일 모노큘러 RGB 비디오에서 인간의 상호작용을 추출하여 휴머노이드 로봇이 물체와의 전신 상호작용 기술을 학습하는 프레임워크이다. Robot-object co-tracking을 통해 강화학습 정책을 훈련하고 실제 로봇에 제로샷 배포한다.