Essence
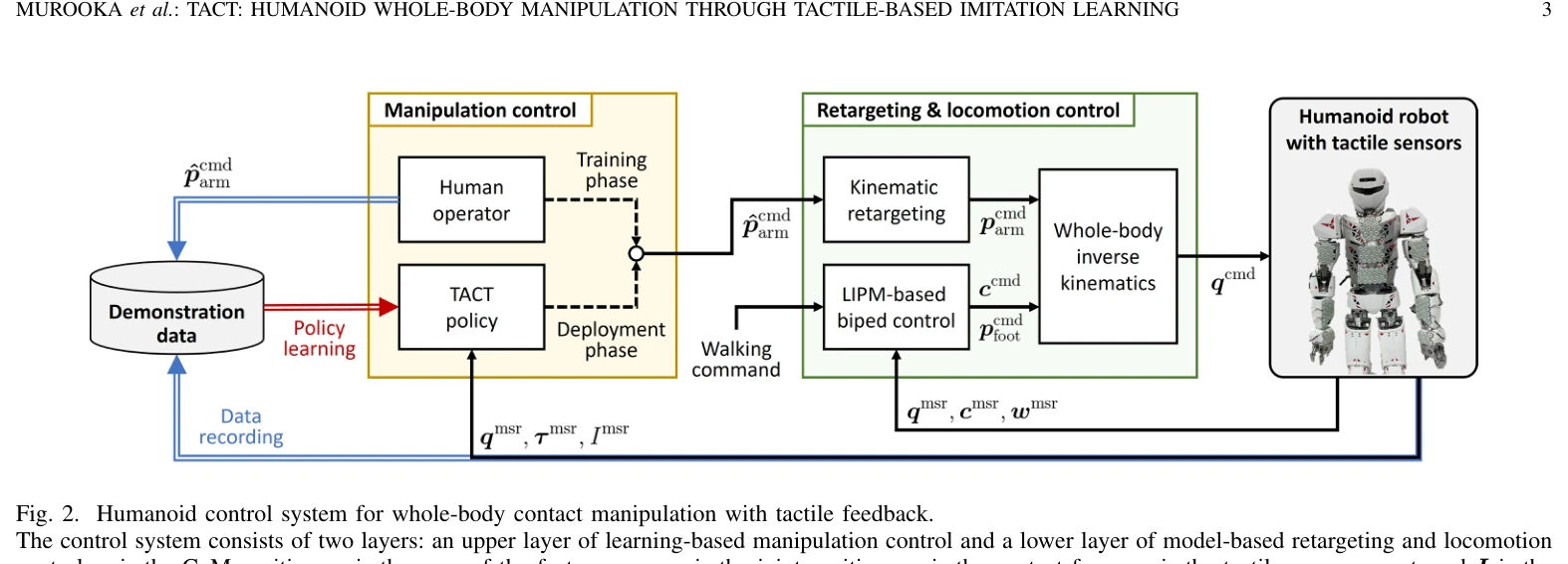
Fig. 2. Humanoid control system for whole-body contact manipulation with tactile feedback.
인간형 로봇이 촉각 센서를 활용한 모방 학습(imitation learning)을 통해 전신 접촉 조작을 수행할 수 있도록 하는 TACT(tactile-modality extended ACT) 제어 시스템을 제안하였다.
저자: Masaki Murooka, Takahiro Hoshi, Kensuke Fukumitsu, Shimpei Masuda, Marwan Hamze, Tomoya Sasaki, Mitsuharu Morisawa, Eiichi Yoshida | 날짜: 2025-06-18 | URL: https://arxiv.org/abs/2506.15146 📄 PDF
Fig. 2. Humanoid control system for whole-body contact manipulation with tactile feedback.
인간형 로봇이 촉각 센서를 활용한 모방 학습(imitation learning)을 통해 전신 접촉 조작을 수행할 수 있도록 하는 TACT(tactile-modality extended ACT) 제어 시스템을 제안하였다.
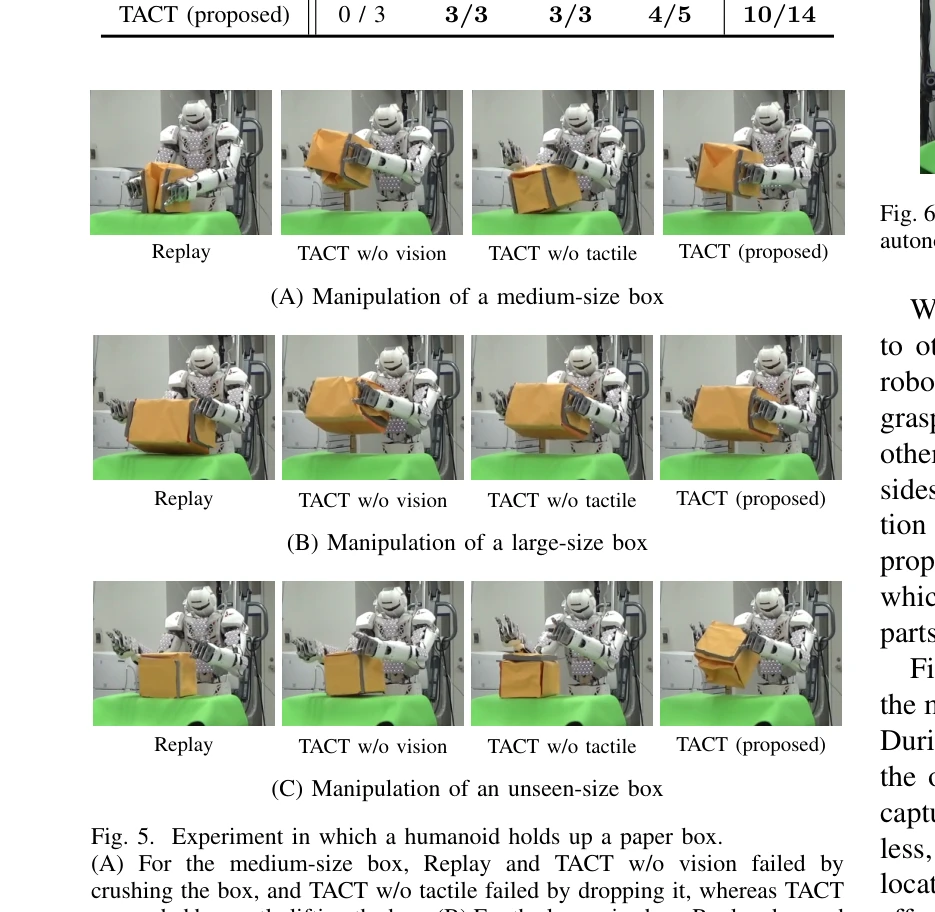
Fig. 5. Experiment in which a humanoid holds up a paper box.
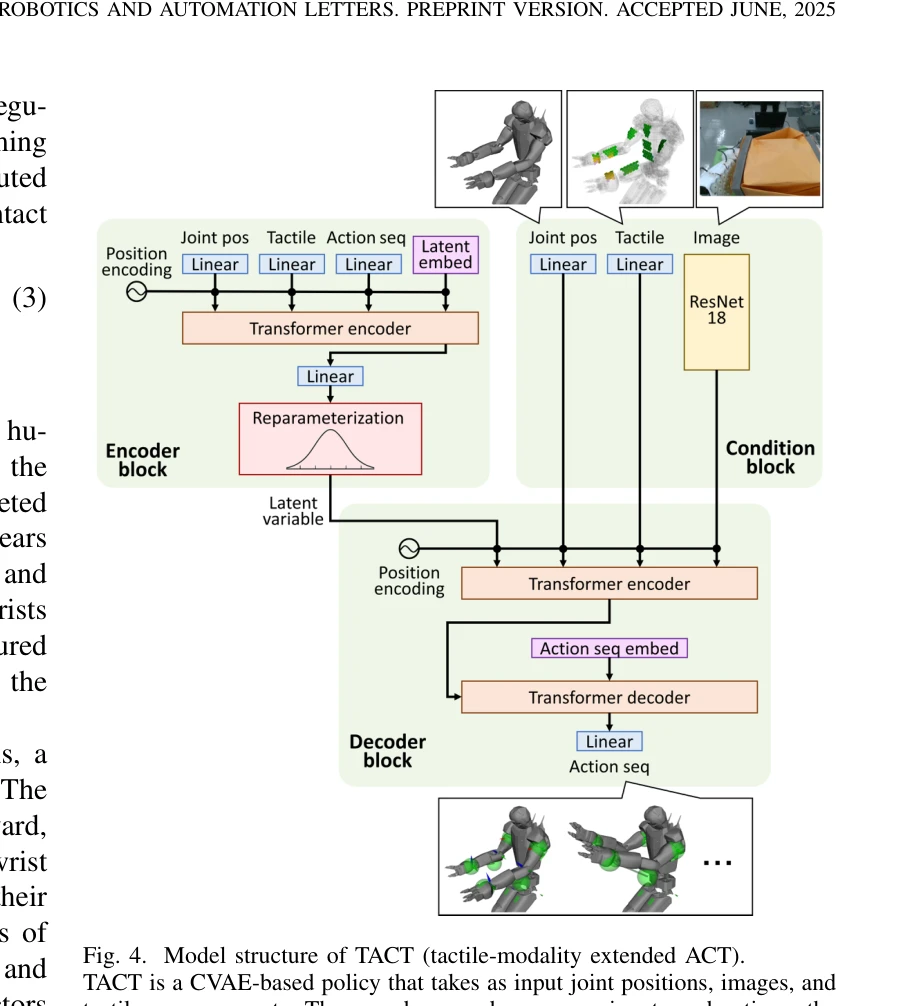
Fig. 4. Model structure of TACT (tactile-modality extended ACT).
총평: 본 연구는 촉각 센서를 Transformer 기반 모방 학습에 성공적으로 통합하여 생활 규모 인간형 로봇의 섬세한 전신 접촉 조작을 최초로 실증했으며, 모델 기반 제어와 학습 기반 제어의 창의적 결합으로 신뢰성과 유연성을 동시에 확보한 의미 있는 기여이다.