Essence
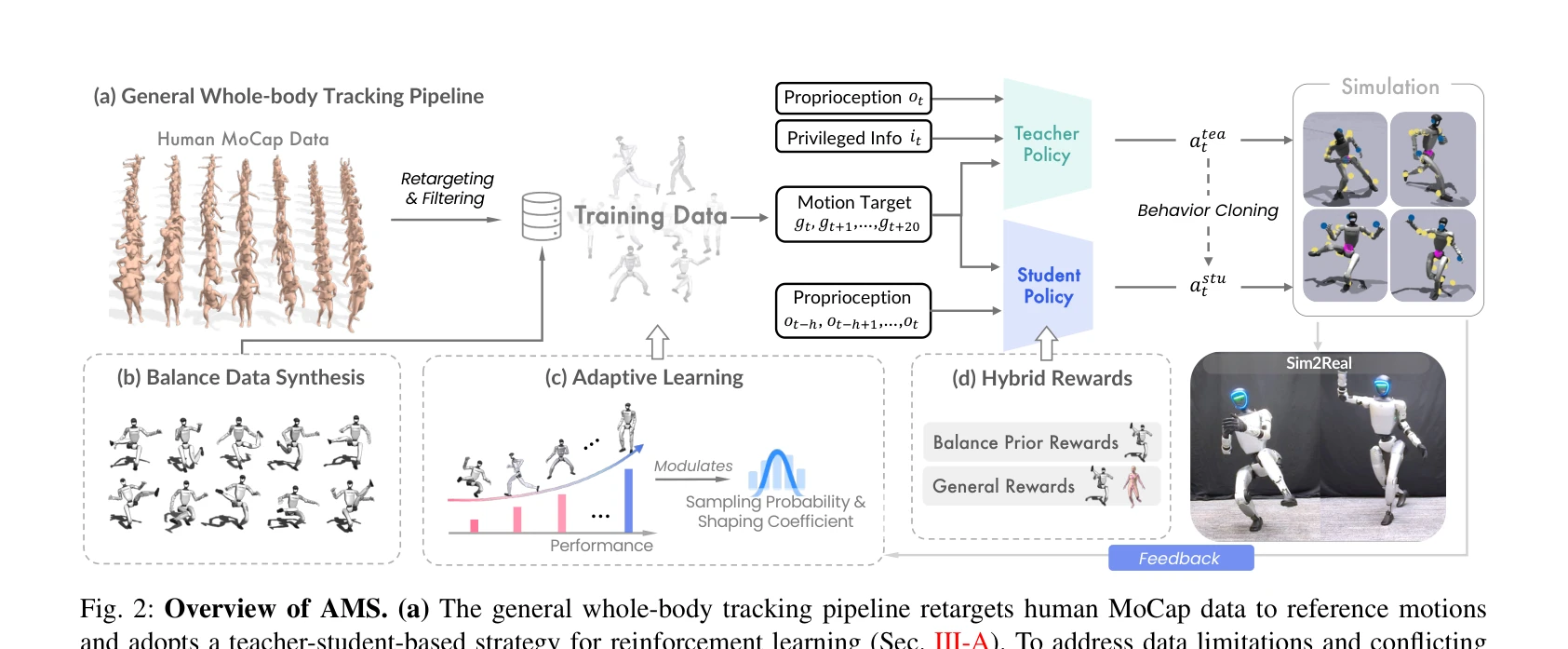
Fig. 2: Overview of AMS. (a) The general whole-body tracking pipeline retargets human MoCap data to reference motions
AMS는 휴먼 모션캡처 데이터와 합성 밸런스 데이터를 결합하여 단일 정책으로 민첩한 동작과 극한의 밸런스 유지를 동시에 수행할 수 있는 휴머노이드 제어 프레임워크다.
저자: Yixuan Pan, Ruoyi Qiao, Li Chen, Kashyap Chitta, Liang Pan, Haoguang Mai, Qingwen Bu, Hao Zhao, Cunyuan Zheng, Ping Luo, Hongyang Li | 날짜: 2026-03-03 | DOI: 10.48550/arXiv.2511.17373 📄 PDF
Fig. 2: Overview of AMS. (a) The general whole-body tracking pipeline retargets human MoCap data to reference motions
AMS는 휴먼 모션캡처 데이터와 합성 밸런스 데이터를 결합하여 단일 정책으로 민첩한 동작과 극한의 밸런스 유지를 동시에 수행할 수 있는 휴머노이드 제어 프레임워크다.
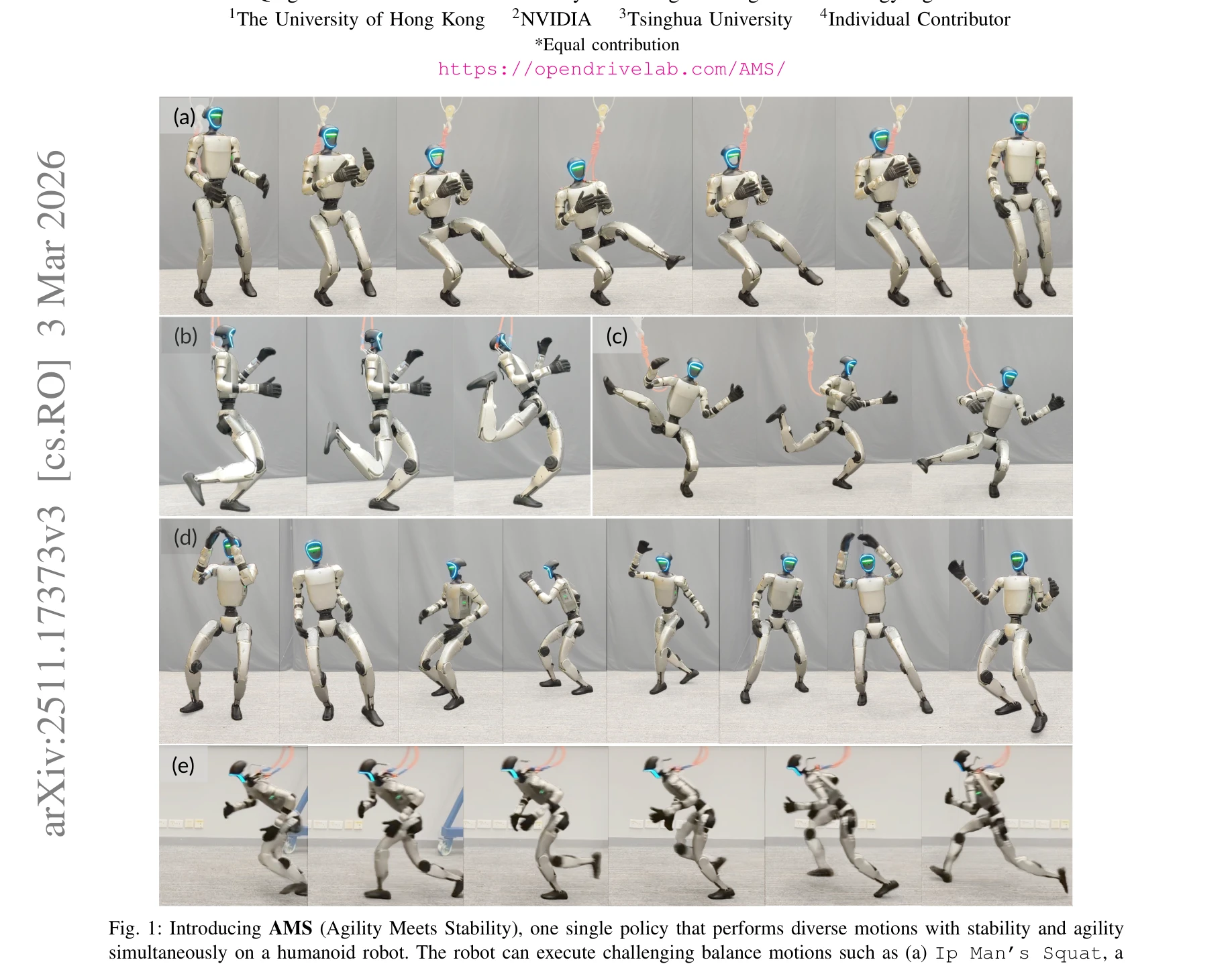
Fig. 1: Introducing AMS (Agility Meets Stability), one single policy that performs diverse motions with stability and ag
Fig. 2: Overview of AMS. (a) The general whole-body tracking pipeline retargets human MoCap data to reference motions
총평: 본 논문은 휴머노이드 로봇 제어의 오랫동안의 과제인 민첩성과 안정성의 통합을 처음으로 체계적으로 해결하며, 이질적 데이터와 하이브리드 보상 설계를 통한 창의적 접근과 실제 로봇에서의 강력한 성과를 보여준다.