Essence
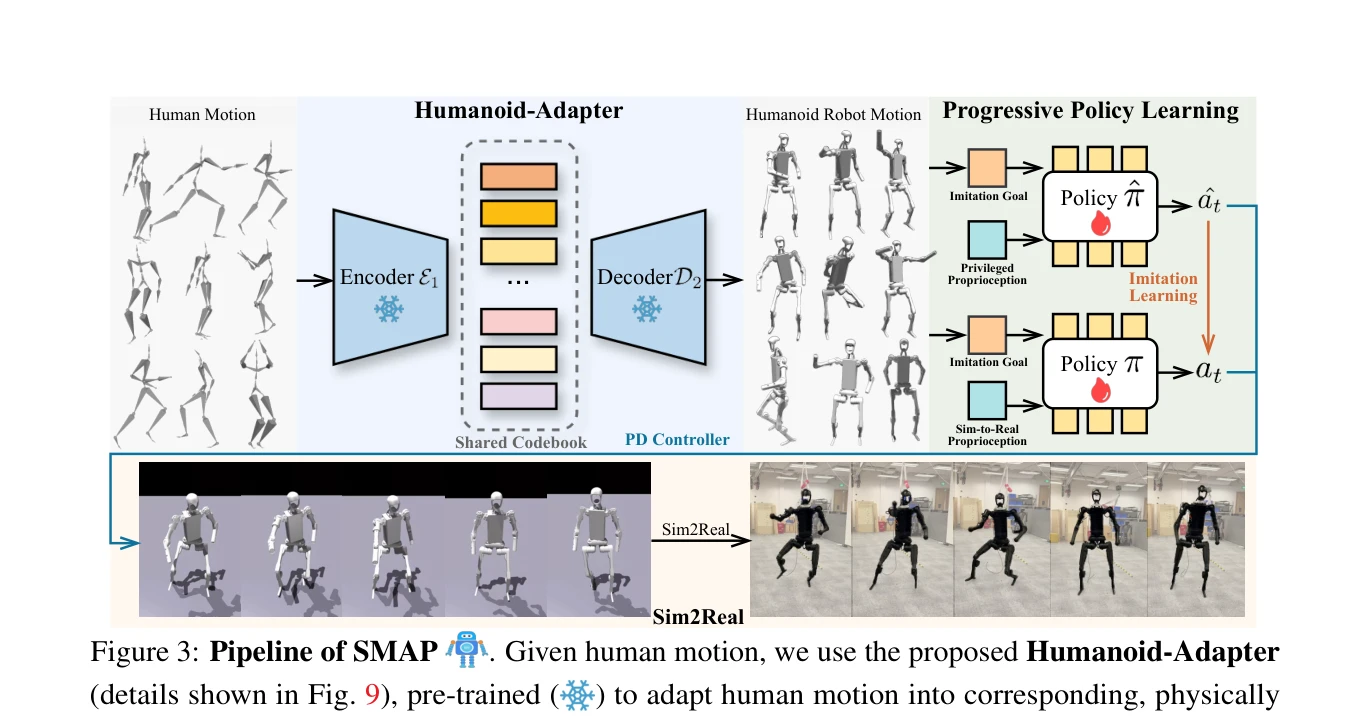
Figure 3: Pipeline of SMAP
본 논문은 인간 모션과 휴머노이드 로봇의 이질적 행동 공간 간 차이를 해결하기 위해 Vector-Quantized Periodic Autoencoder 기반의 Humanoid-Adapter를 제안하여 인간 모션을 물리적으로 타당한 로봇 모션으로 적응시키고, Teacher-Student 증류 학습을 통해 안정적인 전신 제어 정책을 학습한다.
저자: Haoyu Zhao, Sixu Lin, Qingwei Ben, Minyue Dai, Hao Fei, Jingbo Wang, Hua Zou, Junting Dong | 날짜: 2025-05-26 | URL: https://arxiv.org/abs/2505.19463 📄 PDF
Figure 3: Pipeline of SMAP
본 논문은 인간 모션과 휴머노이드 로봇의 이질적 행동 공간 간 차이를 해결하기 위해 Vector-Quantized Periodic Autoencoder 기반의 Humanoid-Adapter를 제안하여 인간 모션을 물리적으로 타당한 로봇 모션으로 적응시키고, Teacher-Student 증류 학습을 통해 안정적인 전신 제어 정책을 학습한다.
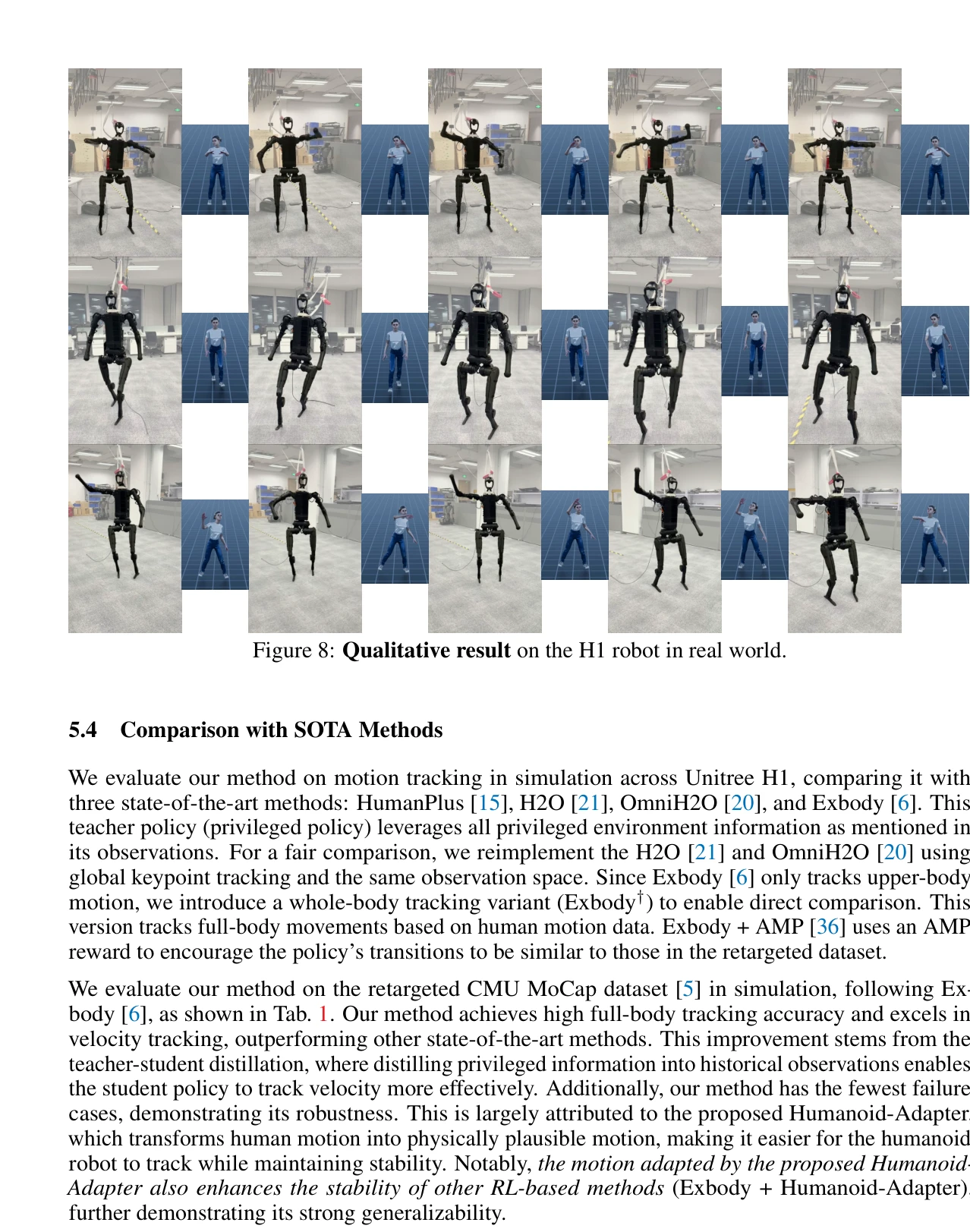
Figure 5: Qualitative results on the H1 robot in simulation.
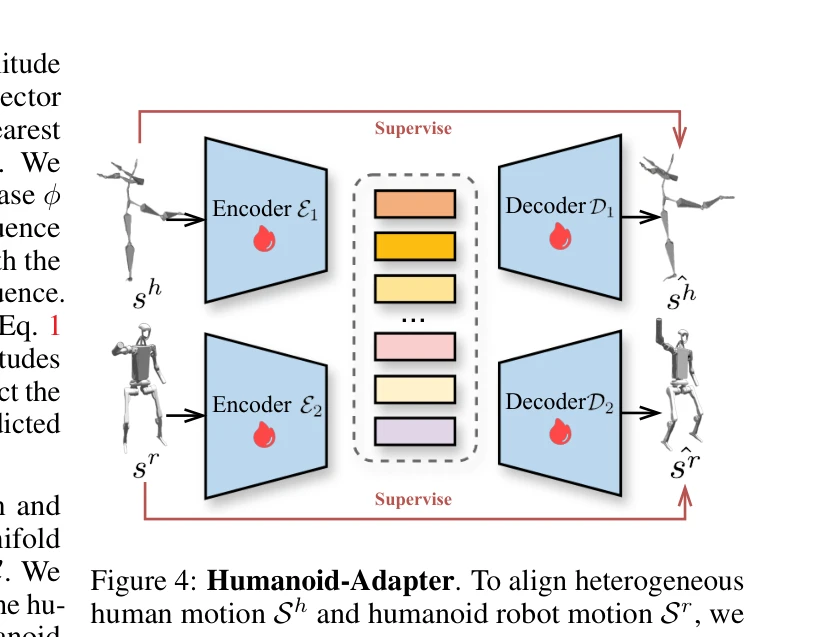
Figure 4: Humanoid-Adapter. To align heterogeneous
총평: 본 논문은 인간-로봇 모션 이질성이라는 실질적 문제를 Vector-Quantized Periodic Autoencoder와 디커플된 보상을 통해 체계적으로 해결하며, 시뮬레이션과 실제 로봇 실험을 통해 방법의 효과성을 충분히 입증한다. 다만 특정 로봇 플랫폼에 한정된 검증과 일반화 가능성에 대한 추가 분석이 있으면 더욱 강력한 논문이 될 것으로 예상된다.