Achievement
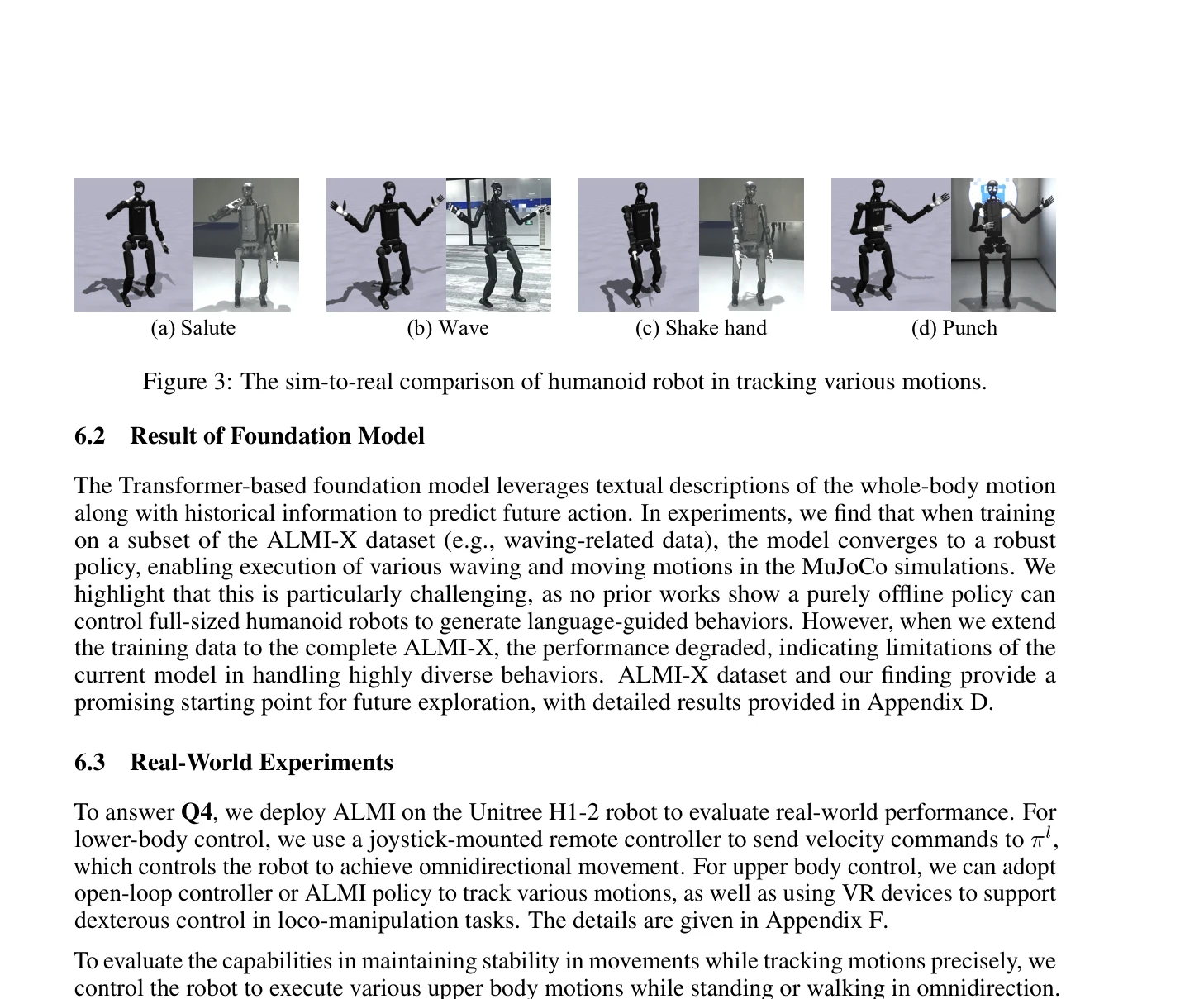
Figure 3: The sim-to-real comparison of humanoid robot in tracking various motions.
- ALMI 프레임워크: 상반신과 하반신을 분리하여 대적적으로 학습하는 novel framework 제안, Theorem 3.1을 통해 ε-approximate Nash equilibrium 수렴 보장
- ALMI-X 데이터셋: 80K 이상의 궤적 데이터와 언어 설명을 포함한 첫 번째 대규모 전신 제어 데이터셋 구축, foundation model 학습 기반 제공
- 실험 검증: Unitree H1-2 로봇에서 robust locomotion과 precise motion tracking 달성, 시뮬레이션과 실제 로봇 간 sim-to-real 성공 입증