Essence

Figure 1: Overview of the proposed versatile humanoid control framework. (A) Scalable
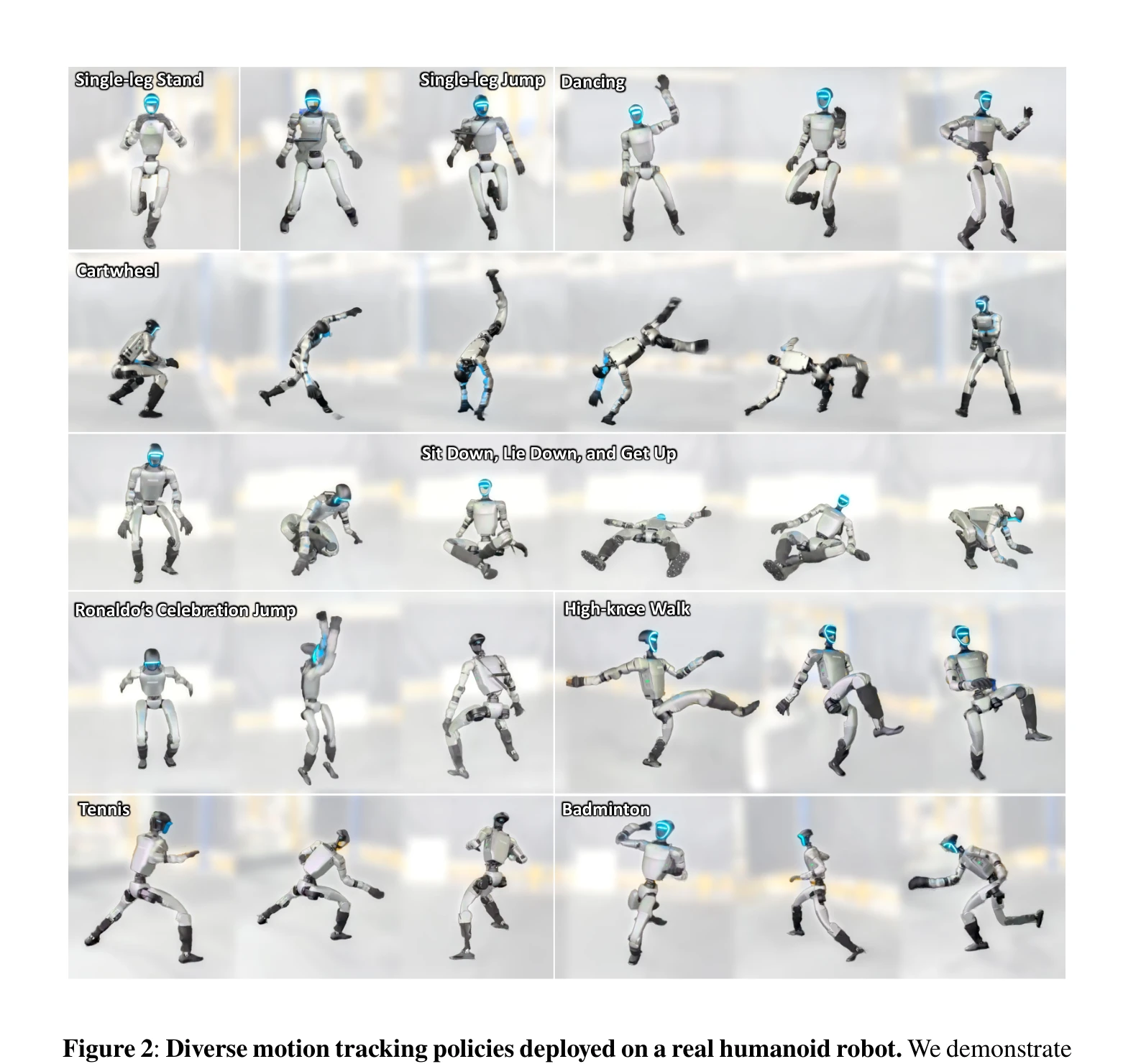
BeyondMimic은 인간 모션 데이터로부터 학습한 compact motion-tracking 공식과 classifier guidance를 활용한 diffusion model을 결합하여, 휴머노이드 로봇이 학습 중 보지 못한 다양한 작업을 zero-shot으로 수행할 수 있는 통합 제어 프레임워크를 제시한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: BeyondMimic은 motion tracking RL의 민첩성과 diffusion 모델의 유연성을 효과적으로 결합하여, 휴머노이드 로봇 제어의 장기적 과제인 자연스러움, 민첩성, versatility를 동시에 달성하는 강력한 프레임워크를 제시한다. 실제 로봇 배포와 zero-shot task 일반화 시연은 로보틱스 커뮤니티에 상당한 기여를 한다.