Essence
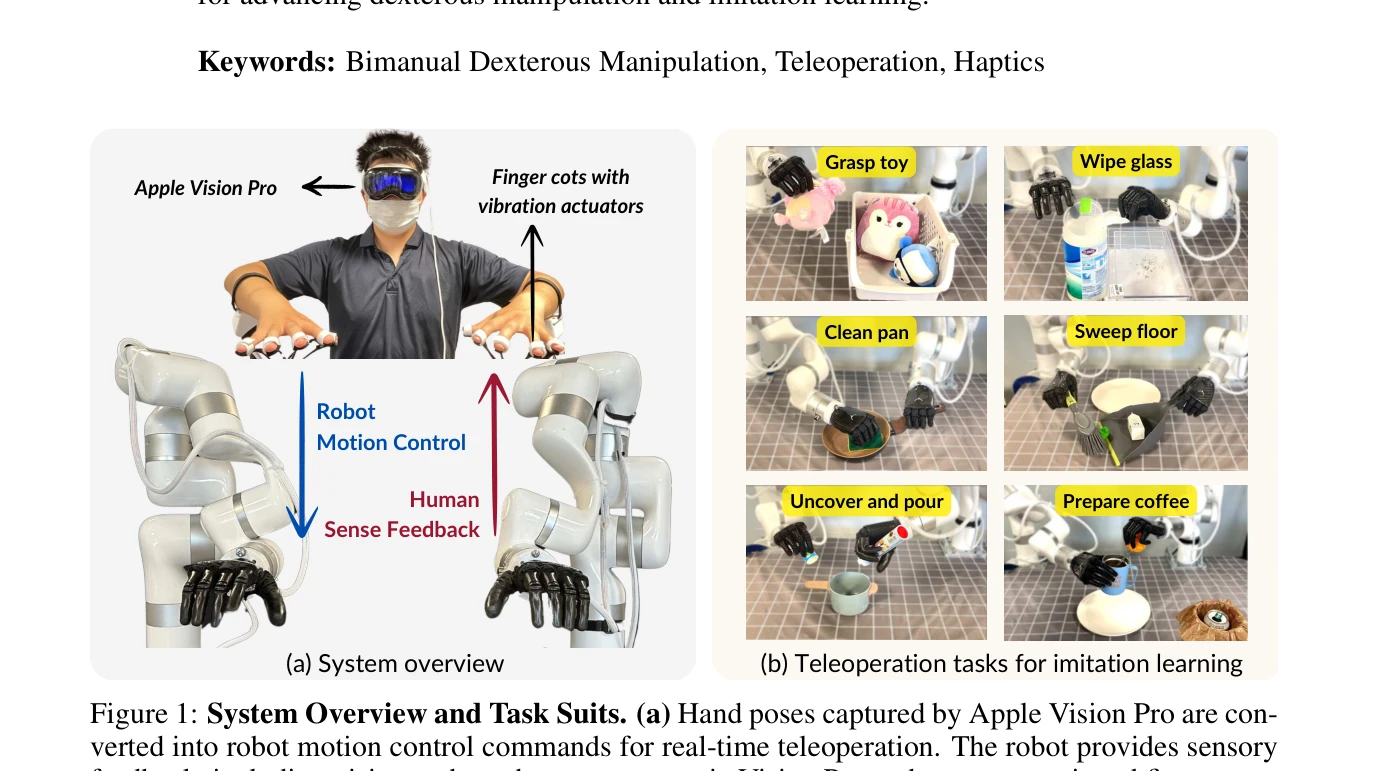
Figure 1: System Overview and Task Suits. (a) Hand poses captured by Apple Vision Pro are con-
Apple Vision Pro의 손 추적 기능을 활용하여 양손 민첩한 조작이 가능한 실시간 텔레오퍼레이션 시스템 Bunny-VisionPro를 제시하며, 저비용 햅틱 피드백과 충돌/특이점 회피를 통해 모방 학습용 고품질 시연 데이터를 수집한다.
저자: Runyu Ding, Yuzhe Qin, Jiyue Zhu, Chengzhe Jia, Shiqi Yang, Ruihan Yang, Xiaojuan Qi, Xiaolong Wang | 날짜: 2024-07-03 | URL: https://arxiv.org/abs/2407.03162 📄 PDF
Figure 1: System Overview and Task Suits. (a) Hand poses captured by Apple Vision Pro are con-
Apple Vision Pro의 손 추적 기능을 활용하여 양손 민첩한 조작이 가능한 실시간 텔레오퍼레이션 시스템 Bunny-VisionPro를 제시하며, 저비용 햅틱 피드백과 충돌/특이점 회피를 통해 모방 학습용 고품질 시연 데이터를 수집한다.
Figure 1: System Overview and Task Suits. (a) Hand poses captured by Apple Vision Pro are con-
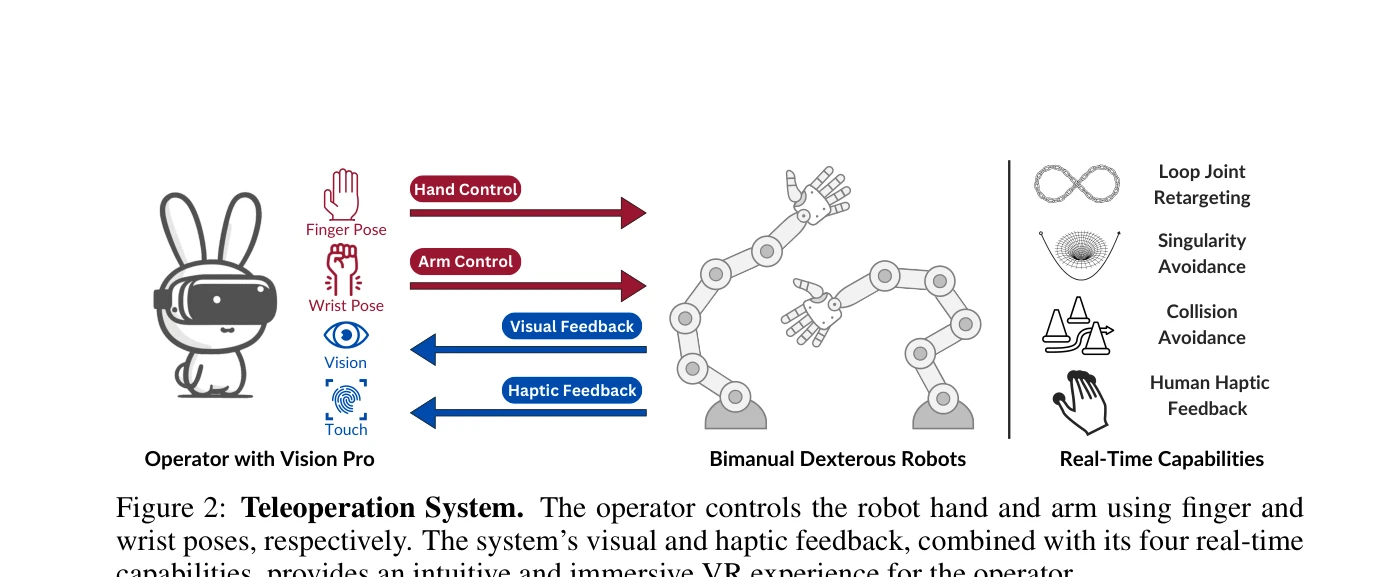
Figure 2: Teleoperation System. The operator controls the robot hand and arm using finger and
총평: Vision Pro를 활용한 양손 민첩 텔레오퍼레이션에서 실시간 성능, 안전성, 몰입감을 동시에 달성한 혁신적 시스템으로, 장시간 복잡 조작의 시연 수집을 통해 모방 학습의 새로운 가능성을 제시하는 높은 기술적·응용적 가치의 연구다.