저자: Mostafa Kamali Tabrizi, Mingshi Chi, Bir Bikram Dey, Yu Qing Yuan, Markus D. Solbach, Yiqian Liu, Michael Jenkin, John K. Tsotsos | 날짜: 2025-12-08 | URL: https://arxiv.org/abs/2512.07998📄 PDF
Essence
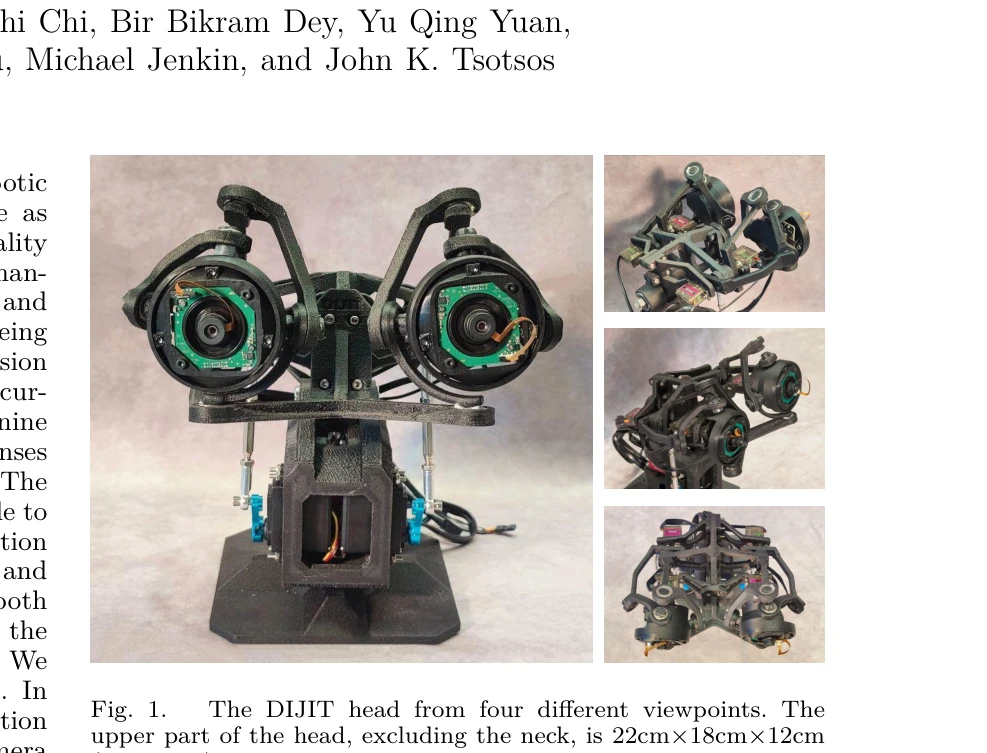
Fig. 1.
본 논문은 능동적 관찰자 역할을 수행하는 이동형 로봇을 위해 설계된 이중 카메라 로봇 헤드 DIJIT를 제시한다. DIJIT는 9개의 기계적 자유도와 4개의 광학적 자유도를 갖추고 있으며, 인간의 시각 체계와 유사한 범위와 속도의 카메라 운동이 가능하다.
Motivation
Known: 능동 시각(active vision)은 로봇 시각 연구에서 중요한 패러다임이며, 다양한 saccade 제어 방법들이 제안되어 왔다. 기존 로봇 헤드들은 자유도, 기선(baseline) 길이, 운동 범위 등에서 인간 시각 체계와의 유사성이 제한적이다.
Gap: 기존 로봇 헤드들 중 대부분이 인간의 시각 체계와 비교하여 기계적 자유도가 부족하거나 인간 수준의 기선 길이를 갖추지 못하고 있다. 특히 각 카메라가 3개의 독립적인 회전 자유도(pan, tilt, roll)와 함께 목 부분에 3개의 추가 자유도를 갖춘 완전한 시스템은 드물다.
Why: 인간의 시각이 eye와 head 운동을 통해 시각 과제를 해결하는 방식과 현대 컴퓨터 비전 방법의 차이를 이해하는 것은 로봇 시각 시스템의 설계와 개선에 중요한 시사점을 제공할 수 있다. 또한 saccade와 같은 기본적인 시각 운동을 정확하게 구현하는 것은 능동 시각 연구의 기초이다.
Approach: DIJIT의 설계는 인간의 시각 체계를 생체모방하여 각 카메라당 3개의 회전 자유도와 목에 3개의 추가 자유도를 포함한다. Saccade 제어를 위해 카메라 방향과 모터 값 사이의 직접적인 관계를 homography를 이용하여 개발하며, 이는 광범위한 훈련 없이 수행 가능하다.
Achievement
Fig. 1.
DIJIT 설계 및 구현: 인간과 유사한 기선 길이(115mm)와 자유도(카메라당 6DOF, 목 3DOF)를 갖춘 로봇 헤드 개발. Saccade 성능: 인간 saccade 속도의 85% 이상을 달성하며 인간 수준의 정확도를 보임. 광학적 자유도: 각 카메라당 4개의 광학적 자유도(초점, 조리개 등) 포함. 오픈소스 공개: 3D 부품 모델, 부품 목록, 소프트웨어 코드를 MIT 라이선스로 공개.
How
각 카메라에 대해 개별적인 pan, tilt, roll 제어를 위한 3개의 회전 자유도 구현
목(neck) 부분에 추가 3개의 기계적 자유도(vergence, version, cyclotorsion 포함) 추가
Homography 기반 saccade 제어: 카메라 방향과 모터 값 사이의 직접적인 매핑 개발
ROS 인터페이스를 통한 소프트웨어 통합
기존 COG 프로젝트의 온라인 학습 방식 대신 사전 계산된 homography 사용으로 실시간 처리 가능
Originality
카메라당 전체 3DOF와 목 3DOF를 모두 갖춘 최초의 인간형 로봇 헤드로, 기존 시스템들(ETL-Humanoid, Robot Bionic Eyes 등)과 비교하여 더 완전한 자유도 구현
Homography 기반의 간단하고 효율적인 saccade 제어 방법으로, 광범위한 신경망 훈련이나 복잡한 동역학 모델링을 회피
인간 수준의 기선 길이(45-80mm vs. DIJIT 115mm)와 운동 범위를 갖춘 설계
Limitation & Further Study
논문에서는 saccade 성능 평가에만 집중하며, vergence와 cyclotorsion의 실제 유용성에 대한 실험 결과는 부재
기존 COG 프로젝트의 90분 calibration 시간 개선 결과는 제시되지 않음
목의 3개 자유도가 실제로 시각 과제 수행에 얼마나 기여하는지에 대한 정량적 분석 부족
향후 연구: DIJIT를 이용한 인간과 로봇의 시각 전략 비교, vergence의 실제 효용성 검증, 더 복잡한 시각 과제에 대한 평가 필요
총평: DIJIT는 인간의 시각 체계를 포괄적으로 모방한 잘 설계된 로봇 헤드로, active vision 연구와 인간-기계 시각 비교를 위한 가치 있는 플랫폼을 제공한다. 특히 완전한 자유도 구현과 실용적인 saccade 제어 방법은 주목할 만하며, 오픈소스 공개로 인한 접근성도 강점이다.