Essence
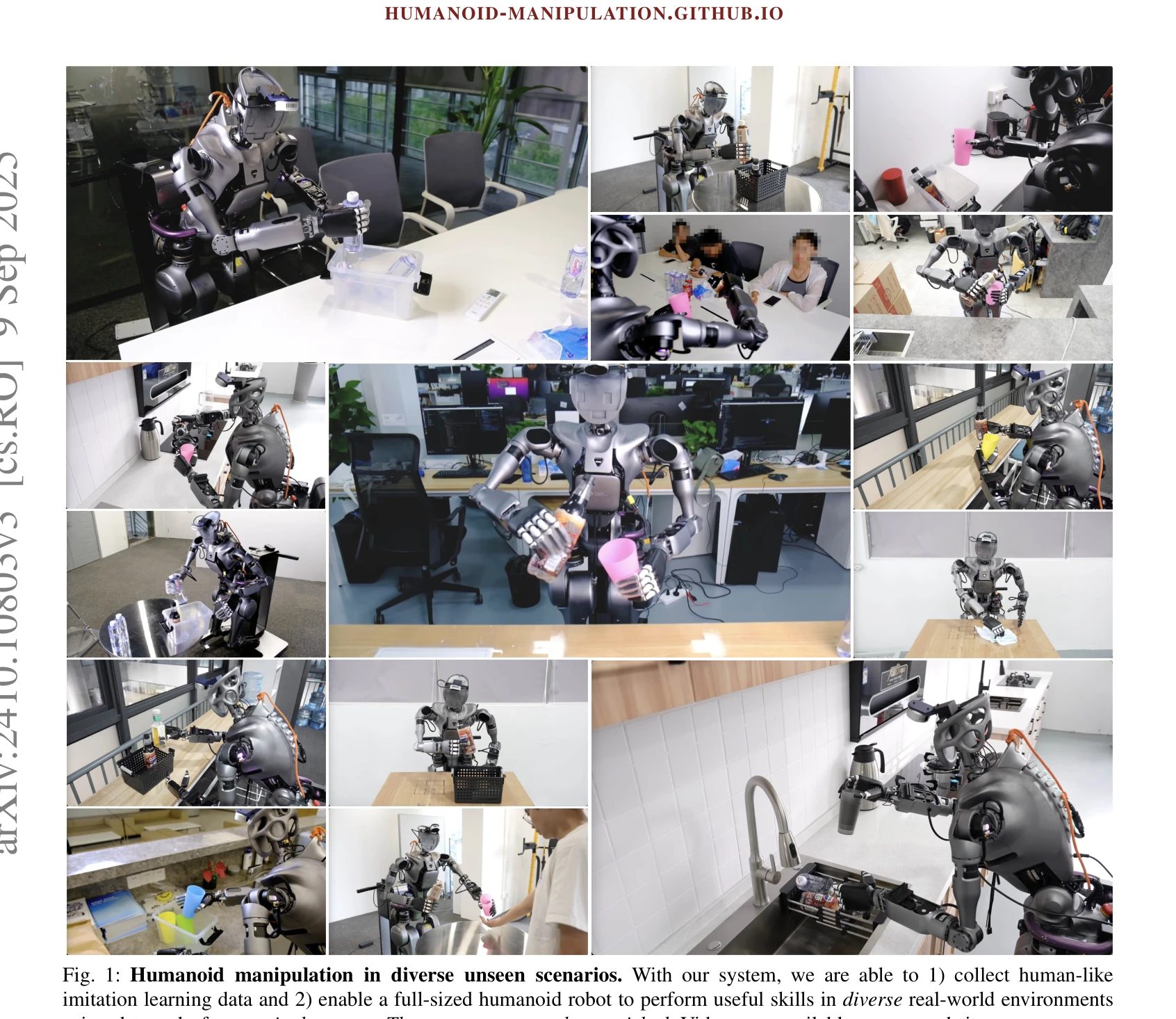
Fig. 1: Humanoid manipulation in diverse unseen scenarios. With our system, we are able to 1) collect human-like
이 논문은 단일 장면에서 수집한 데이터만으로 휴머노이드 로봇이 다양한 미지의 실제 환경에서 자율적으로 조작 작업을 수행하도록 하는 3D Diffusion Policy 기반 시스템을 제시한다.
저자: Yanjie Ze, Zixuan Chen, Wenhao Wang, Tianyi Chen, Xialin He, Ying Yuan, Xue Bin Peng, Jiajun Wu | 날짜: 2024-10-14 | URL: https://arxiv.org/abs/2410.10803 📄 PDF
Fig. 1: Humanoid manipulation in diverse unseen scenarios. With our system, we are able to 1) collect human-like
이 논문은 단일 장면에서 수집한 데이터만으로 휴머노이드 로봇이 다양한 미지의 실제 환경에서 자율적으로 조작 작업을 수행하도록 하는 3D Diffusion Policy 기반 시스템을 제시한다.
Fig. 1: Humanoid manipulation in diverse unseen scenarios. With our system, we are able to 1) collect human-like
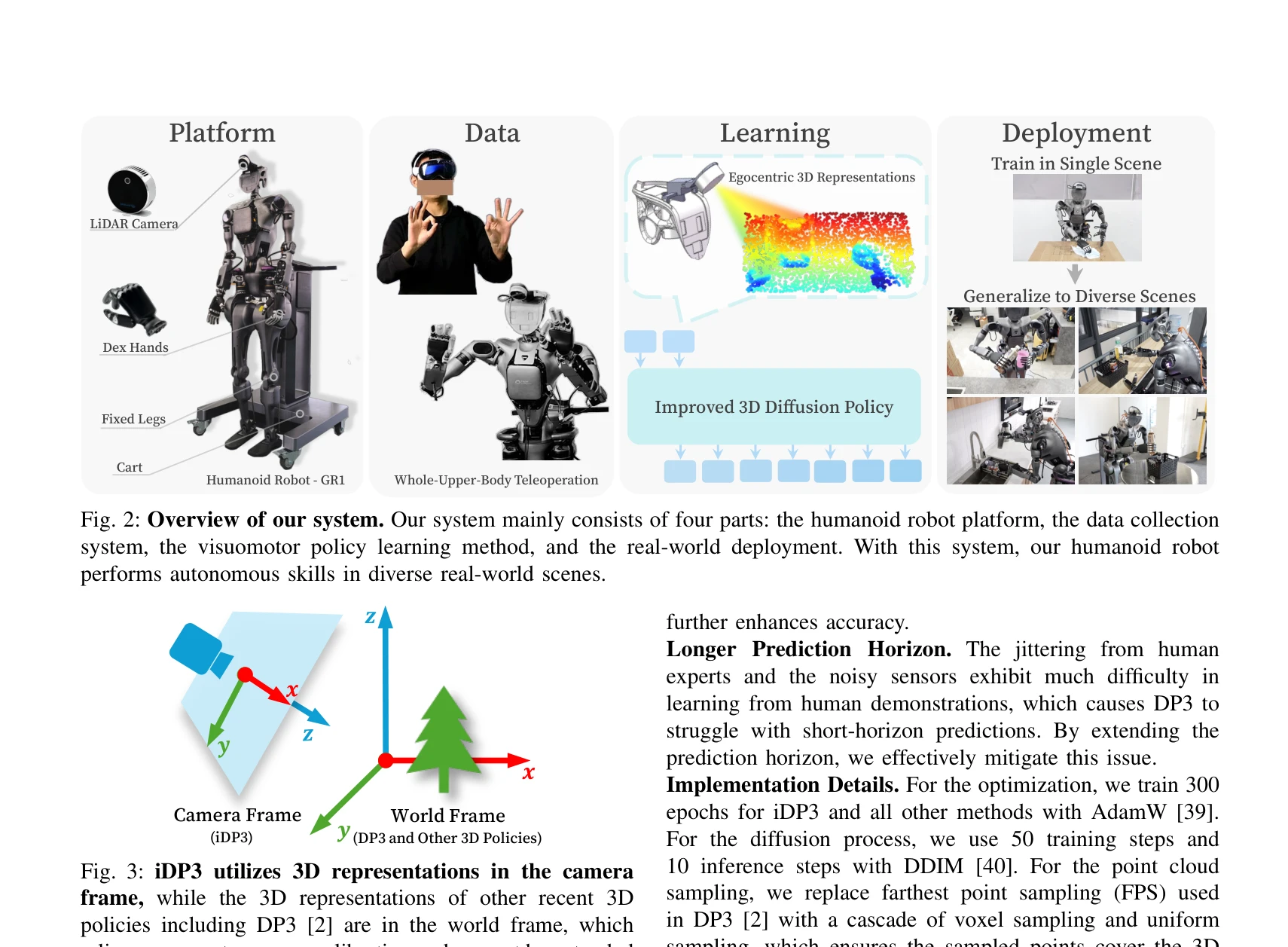
Fig. 2: Overview of our system. Our system mainly consists of four parts: the humanoid robot platform, the data collecti
총평: 이 논문은 휴머노이드 로봇의 장면 일반화 조작이라는 미해결 문제를 최초로 해결하며, 개선된 3D Diffusion Policy와 완전한 실제 환경 시스템을 통해 단일 장면 데이터만으로 다양한 미지 환경에서의 자율 작동을 달성한 의미 있는 기여를 제시한다.