Essence
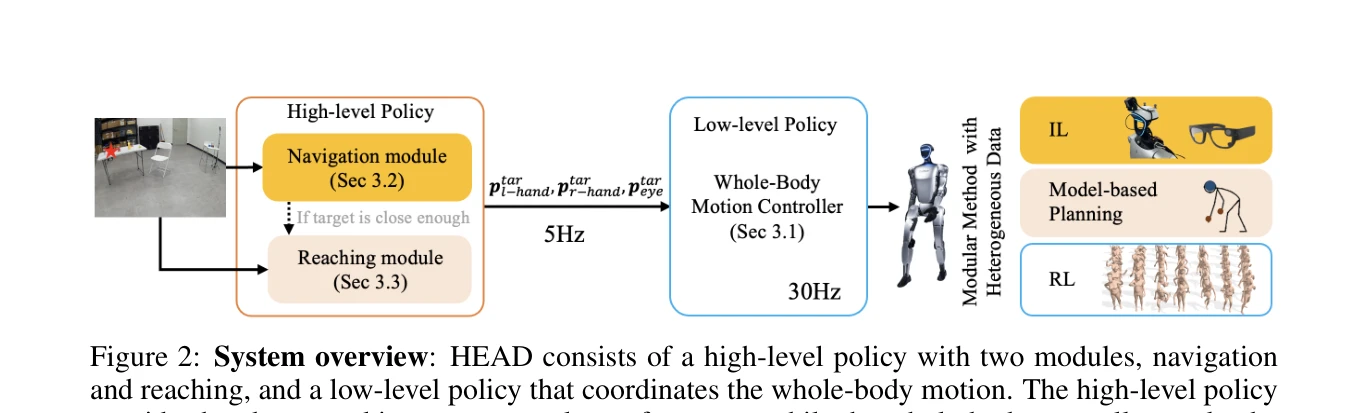
Figure 2: System overview: HEAD consists of a high-level policy with two modules, navigation
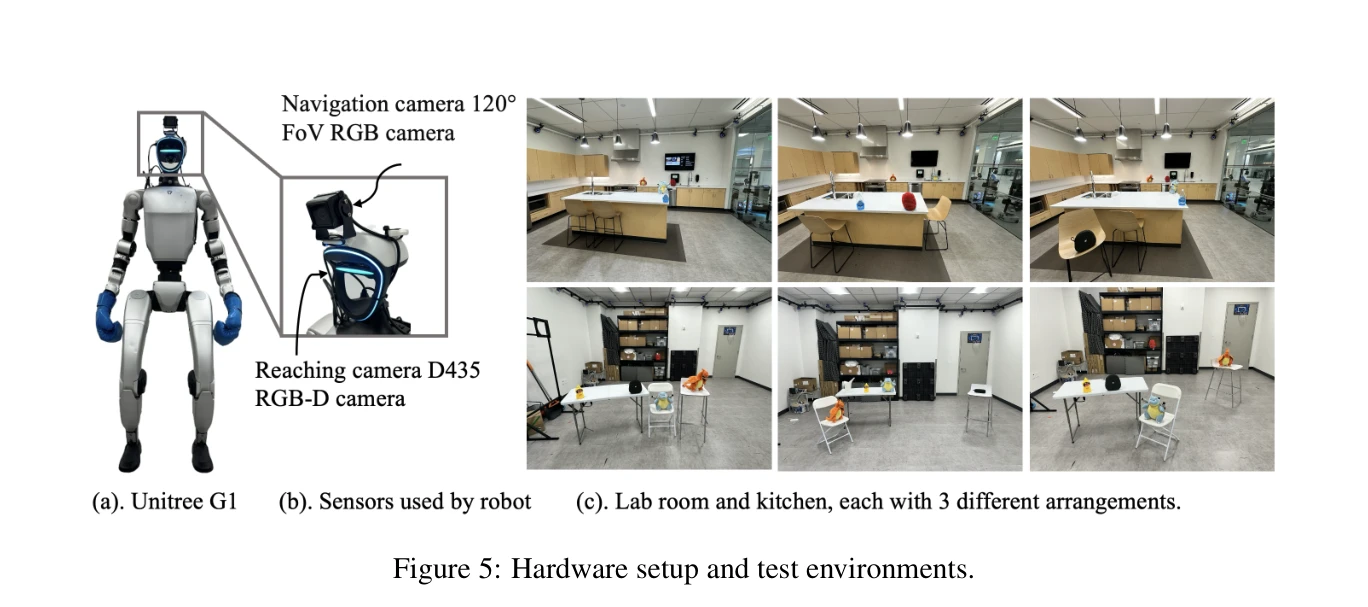
인간 모션 캡처와 에고센트릭 비전 데이터로부터 휴머노이드 로봇의 네비게이션, 로코모션, 리칭 능력을 학습하는 HEAD 프레임워크를 제안한다. 고수준 정책이 손과 눈의 목표 위치를 명령하고 저수준 whole-body controller가 추적하는 모듈식 접근법을 채택한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: HEAD는 모듈식 설계와 sparse 3-point tracking을 통해 휴머노이드 로봇의 통합적 navigation, locomotion, reaching을 효과적으로 학습하는 창의적인 접근을 제시하며, 실제 로봇에서의 동작 검증으로 실용성을 입증한다. 다만 human 데이터 의존성과 정제 비용, 환경 일반화 가능성에 대한 추가 분석이 필요하다.