Essence
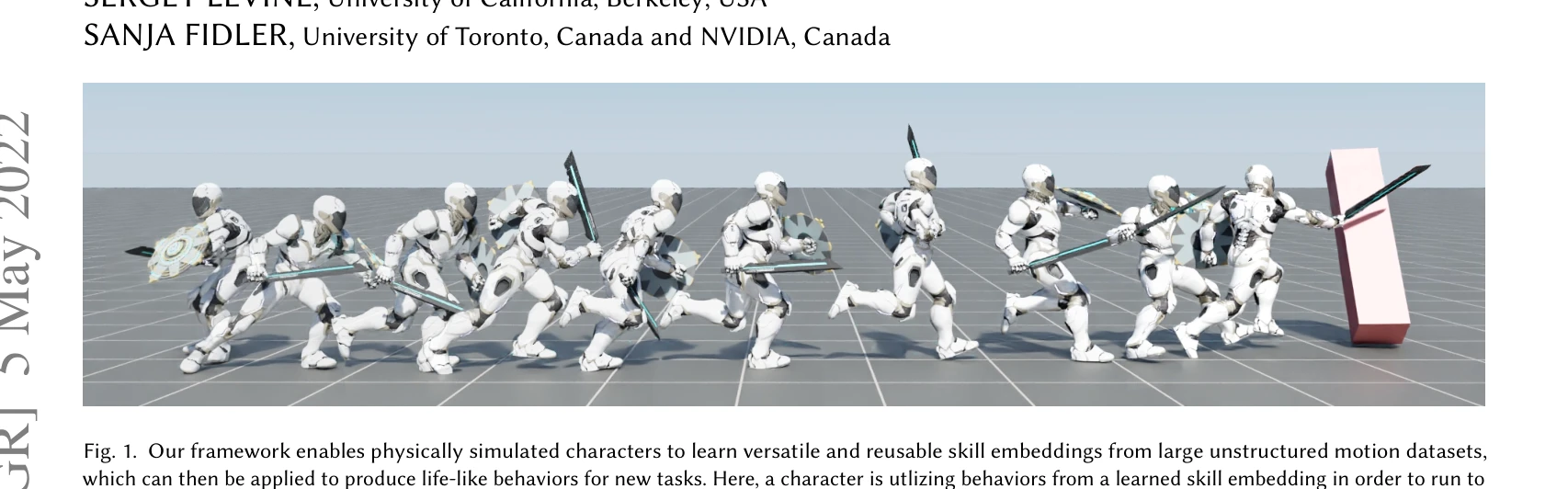
Fig. 1. Our framework enables physically simulated characters to learn versatile and reusable skill embeddings from larg
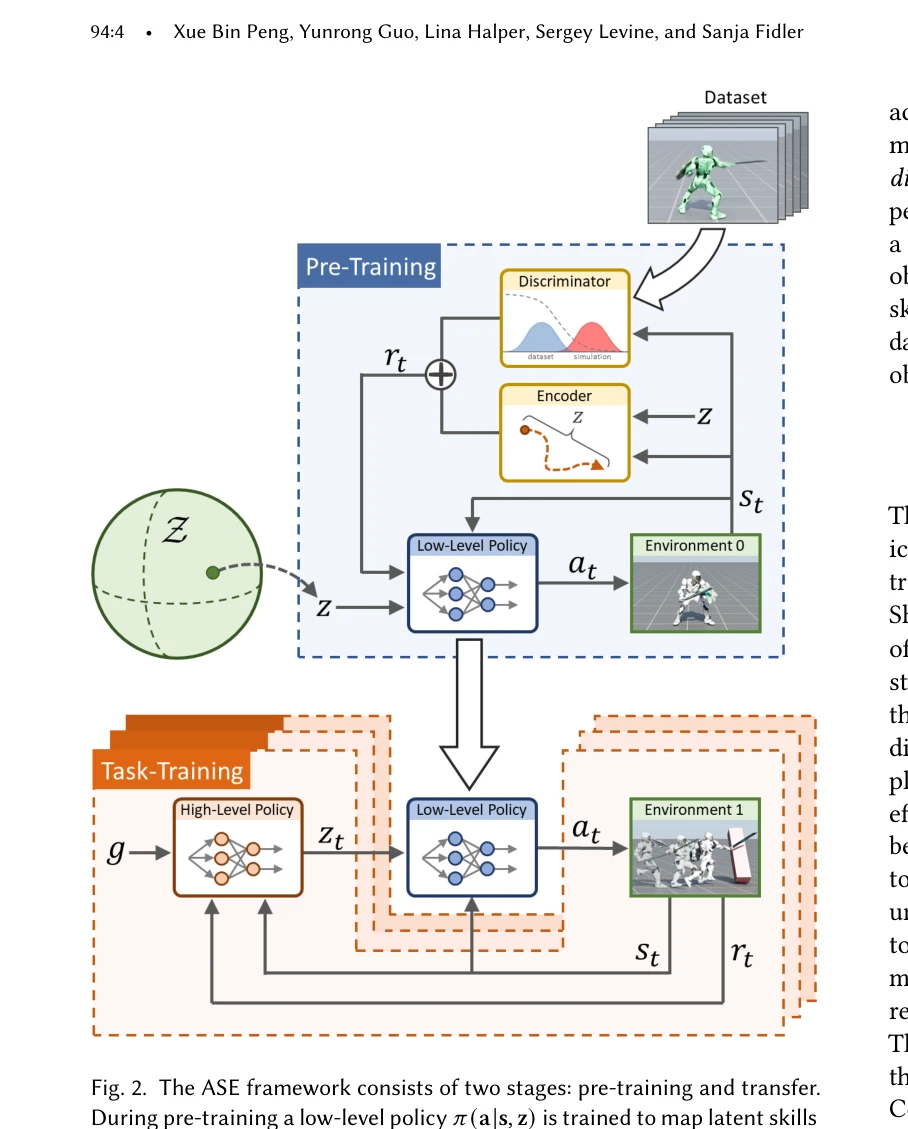
대규모 비정형 모션 데이터셋으로부터 adversarial imitation learning과 unsupervised reinforcement learning을 결합하여 물리 시뮬레이션 캐릭터의 재사용 가능한 스킬 임베딩을 학습하는 데이터 기반 프레임워크를 제시한다. 학습된 스킬 임베딩은 다양한 새로운 과제에 효과적으로 전이되며 자연스러운 행동을 합성한다.