Essence
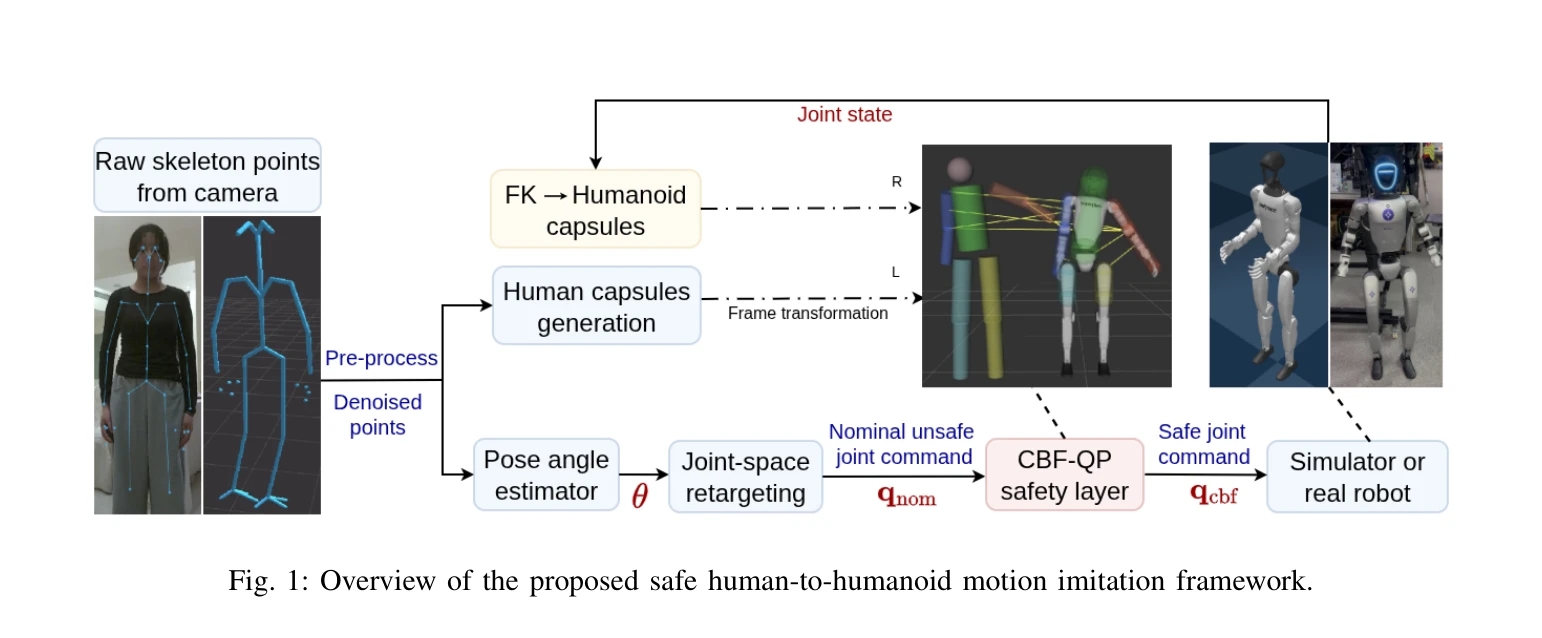
Fig. 1: Overview of the proposed safe human-to-humanoid motion imitation framework.
비전 기반 motion retargeting과 Control Barrier Function을 결합하여 휴머노이드 로봇이 인간의 동작을 모방하면서 자기 충돌과 인간-로봇 충돌을 실시간으로 회피할 수 있는 안전 프레임워크를 제시한다.
저자: Wenqi Cai, John Abanes, Nikolaos Evangeliou, Anthony Tzes | 날짜: 2026-04-13 | URL: https://arxiv.org/abs/2604.11447 📄 PDF
Fig. 1: Overview of the proposed safe human-to-humanoid motion imitation framework.
비전 기반 motion retargeting과 Control Barrier Function을 결합하여 휴머노이드 로봇이 인간의 동작을 모방하면서 자기 충돌과 인간-로봇 충돌을 실시간으로 회피할 수 있는 안전 프레임워크를 제시한다.
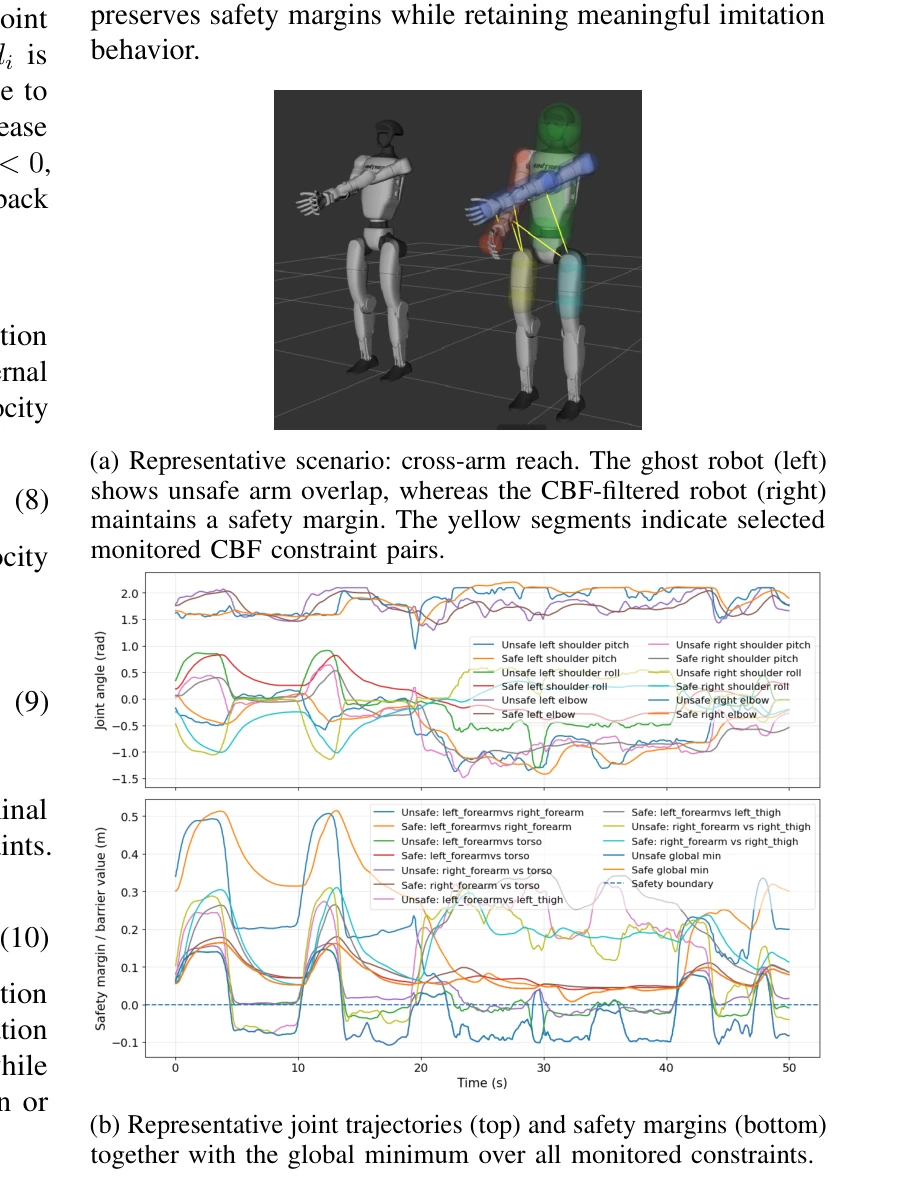
Fig. 2: Self-collision avoidance with and without CBF-QP.
Fig. 1: Overview of the proposed safe human-to-humanoid motion imitation framework.
총평: 비전 기반 motion imitation에 CBF를 체계적으로 도입하여 실시간 안전 필터링을 구현한 실질적 기여이며, 충돌 회피와 responsiveness의 균형을 QP로 효과적으로 달성했다. 다만 시뮬레이션만 제시되고 하드웨어 검증이 필요하며, 설계 parameter 튜닝과 일반화 가능성 개선이 추후 과제이다.