Essence
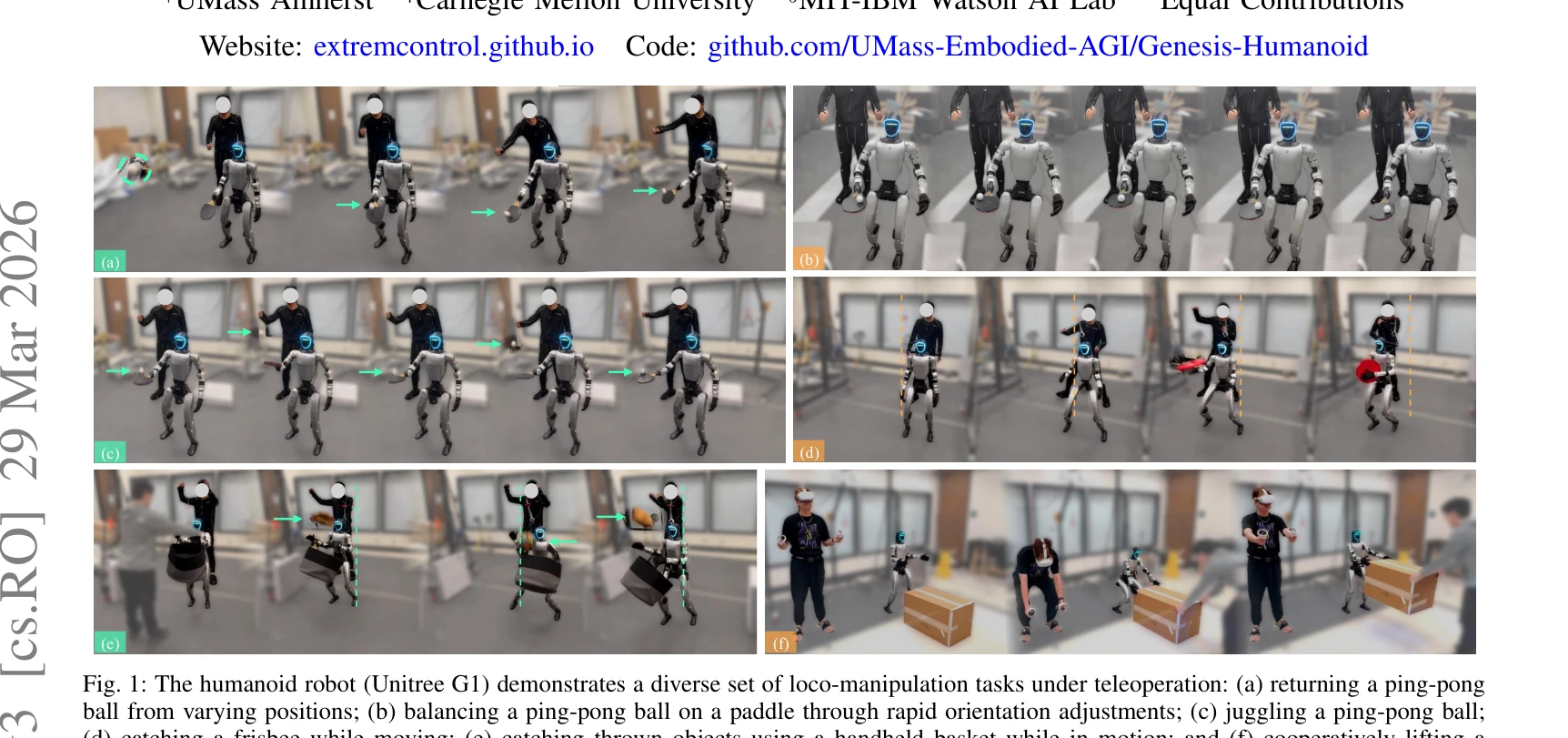
Fig. 1: The humanoid robot (Unitree G1) demonstrates a diverse set of loco-manipulation tasks under teleoperation: (a) r
ExtremControl은 SE(3) 포즈 기반의 직접 제어와 velocity feedforward 제어를 통해 humanoid teleoperation의 지연시간을 50ms까지 단축하는 저지연 전신 제어 프레임워크이다.