Essence
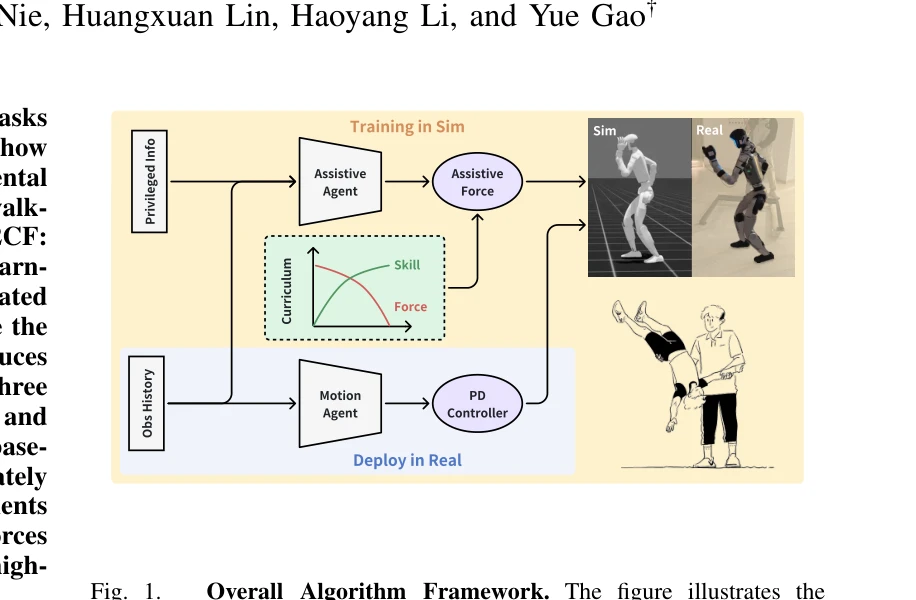
Fig. 1.
인간의 학습 방식을 모방한 적응형 보조력(Adaptive Assistive Curriculum Force, A2CF)을 제안하여 휴머노이드 로봇의 복잡한 동작 학습을 가속화하는 이중-에이전트 강화학습 프레임워크를 제시한다.
저자: Zhanxiang Cao, Yang Zhang, Buqing Nie, Huangxuan Lin, Haoyang Li, Yue Gao | 날짜: 2025-06-29 | URL: https://arxiv.org/abs/2506.23125 📄 PDF
Fig. 1.
인간의 학습 방식을 모방한 적응형 보조력(Adaptive Assistive Curriculum Force, A2CF)을 제안하여 휴머노이드 로봇의 복잡한 동작 학습을 가속화하는 이중-에이전트 강화학습 프레임워크를 제시한다.
Fig. 1.
총평: 인간의 자연스러운 학습 과정에서 영감을 얻은 적응형 보조력 메커니즘으로 휴머노이드 로봇의 복잡한 동작 학습을 획기적으로 가속화한 논문이며, 실제 로봇 실험을 통한 검증과 명확한 성과 지표가 높은 실용적 가치를 제공한다.