Essence
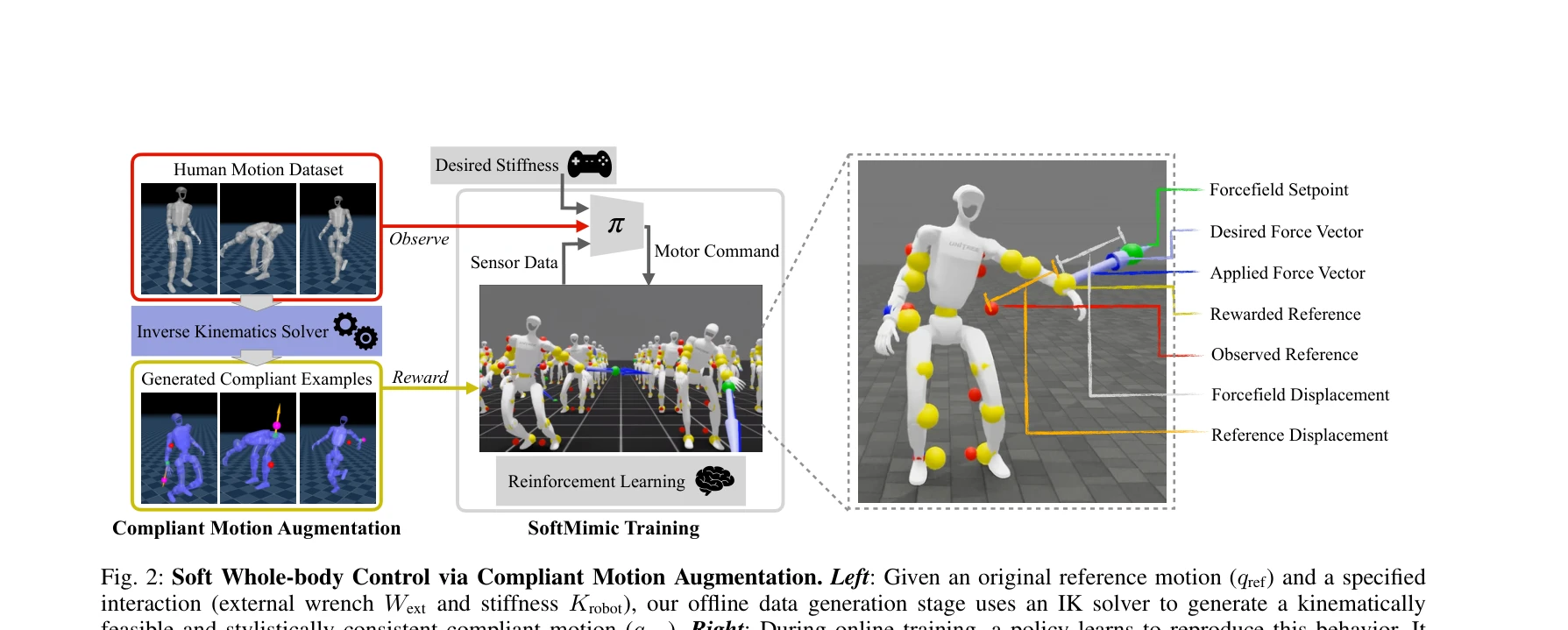
Fig. 2: Soft Whole-body Control via Compliant Motion Augmentation. Left: Given an original reference motion (qref) and a
SoftMimic은 역기구학 솔버를 이용해 순응적 동작 데이터셋을 생성하고 강화학습으로 학습하여, 인간형 로봇이 외부 힘에 순응하면서도 균형을 유지하는 제어 정책을 학습하는 프레임워크이다.
저자: Gabriel B. Margolis, Michelle Wang, Nolan Fey, Pulkit Agrawal | 날짜: 2025-10-20 | DOI: 10.48550/arXiv.2510.17792 📄 PDF
Fig. 2: Soft Whole-body Control via Compliant Motion Augmentation. Left: Given an original reference motion (qref) and a
SoftMimic은 역기구학 솔버를 이용해 순응적 동작 데이터셋을 생성하고 강화학습으로 학습하여, 인간형 로봇이 외부 힘에 순응하면서도 균형을 유지하는 제어 정책을 학습하는 프레임워크이다.
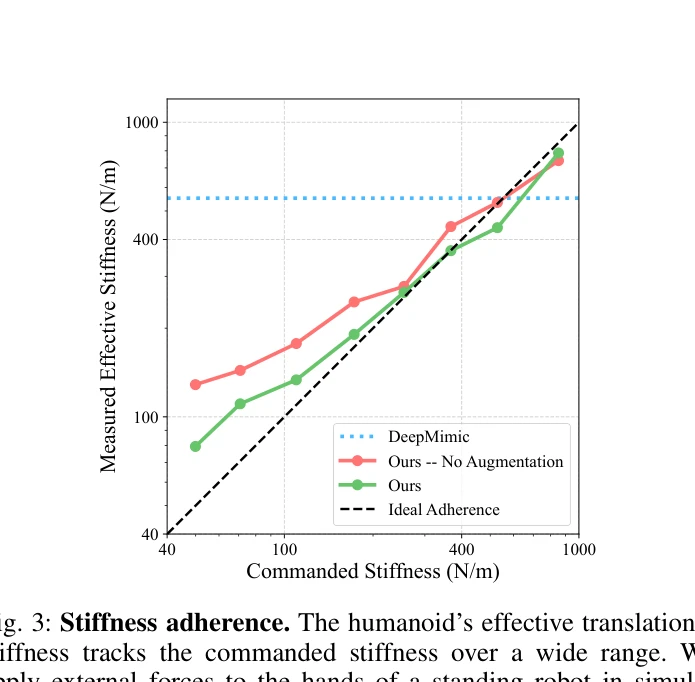
Fig. 3: Stiffness adherence. The humanoid’s effective translational
Fig. 2: Soft Whole-body Control via Compliant Motion Augmentation. Left: Given an original reference motion (qref) and a
총평: SoftMimic은 역기구학 기반 데이터 증강과 강화학습을 창의적으로 결합하여 인간형 로봇의 순응적 제어라는 중요한 문제를 체계적으로 해결하며, 이론과 실제 로봇 실험으로 그 효과를 입증한 우수한 연구이다.