Essence
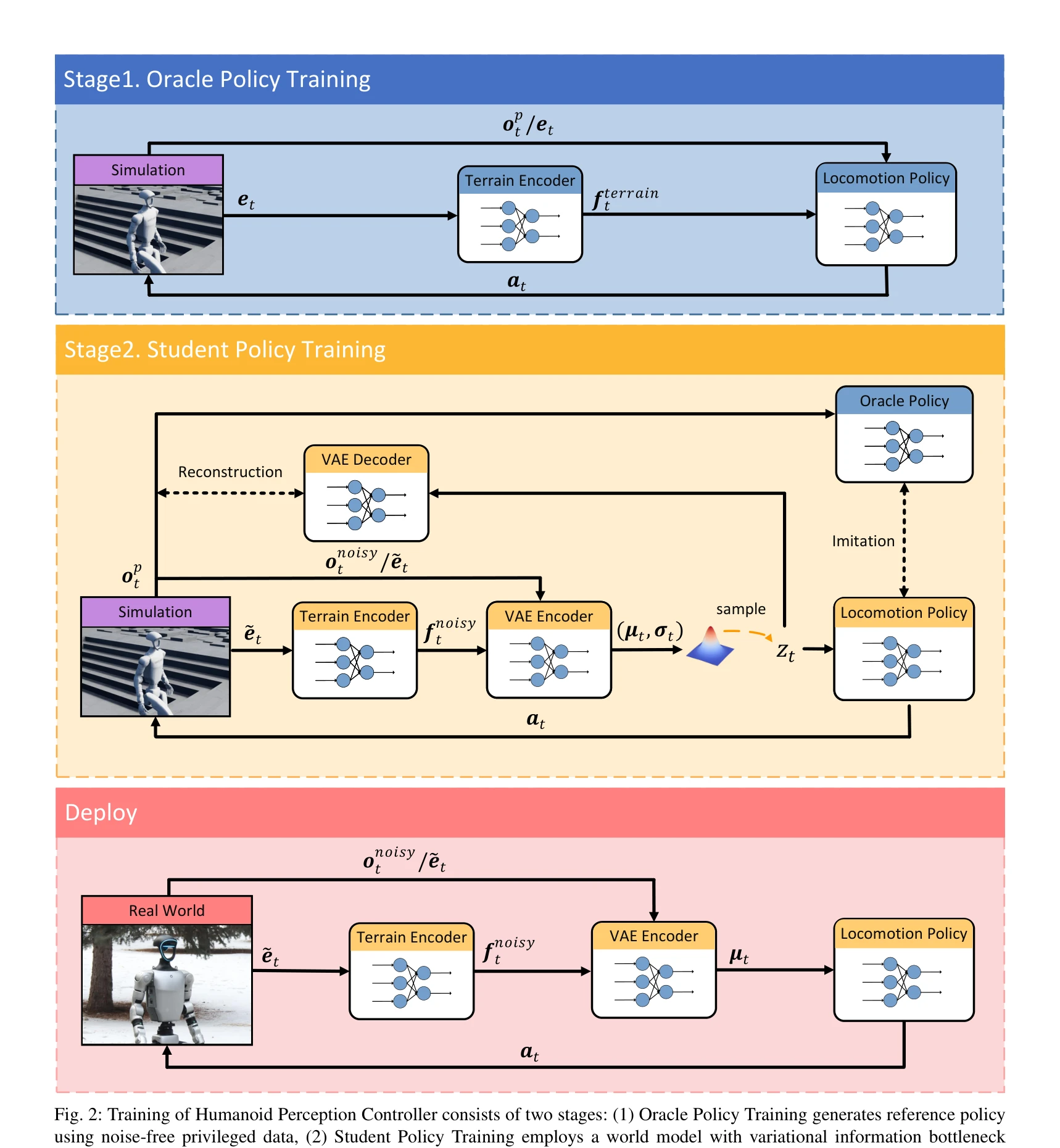
Fig. 2: Training of Humanoid Perception Controller consists of two stages: (1) Oracle Policy Training generates referenc
인간형 로봇이 소음이 있는 센서 데이터로부터 지형을 인식하고 거친 지형을 안정적으로 보행할 수 있도록, teacher-student distillation과 variational information bottleneck을 결합한 세계 모델 기반 방법을 제안한다.
