Essence
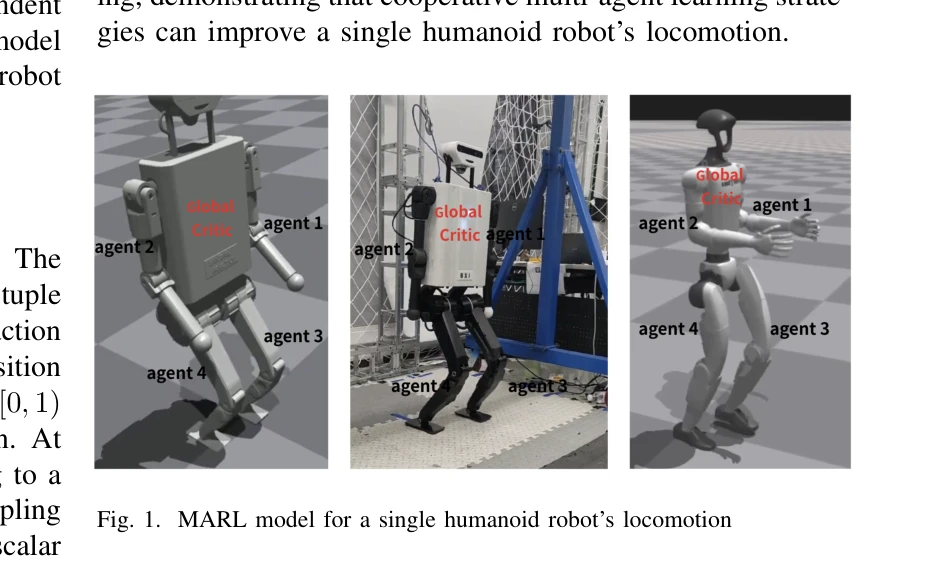
Fig. 1. MARL model for a single humanoid robot’s locomotion
단일 인간형 로봇의 보행을 위해 각 팔다리를 독립 에이전트로 모델링하여 Cooperative-Heterogeneous MARL을 적용하는 MASH 프레임워크를 제안한다. 이는 전역 비평가를 공유하며 협력학습을 통해 전신 조화 능력을 향상시킨다.
저자: Qi Liu, Xiaopeng Zhang, Mingshan Tan, Shuaikang Ma, Jinliang Ding, Yanjie Li | 날짜: 2025-08-14 | URL: https://arxiv.org/abs/2508.10423 📄 PDF
Fig. 1. MARL model for a single humanoid robot’s locomotion
단일 인간형 로봇의 보행을 위해 각 팔다리를 독립 에이전트로 모델링하여 Cooperative-Heterogeneous MARL을 적용하는 MASH 프레임워크를 제안한다. 이는 전역 비평가를 공유하며 협력학습을 통해 전신 조화 능력을 향상시킨다.
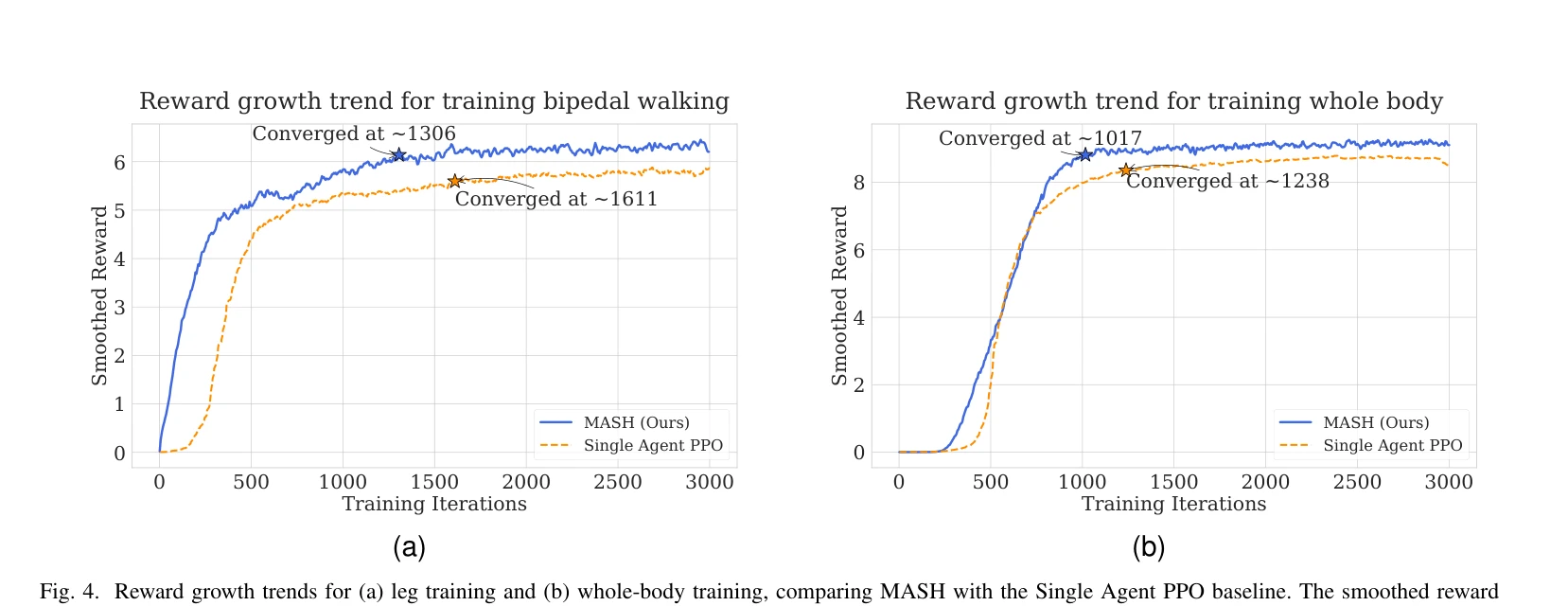
Fig. 4. Reward growth trends for (a) leg training and (b) whole-body training, comparing MASH with the Single Agent PPO
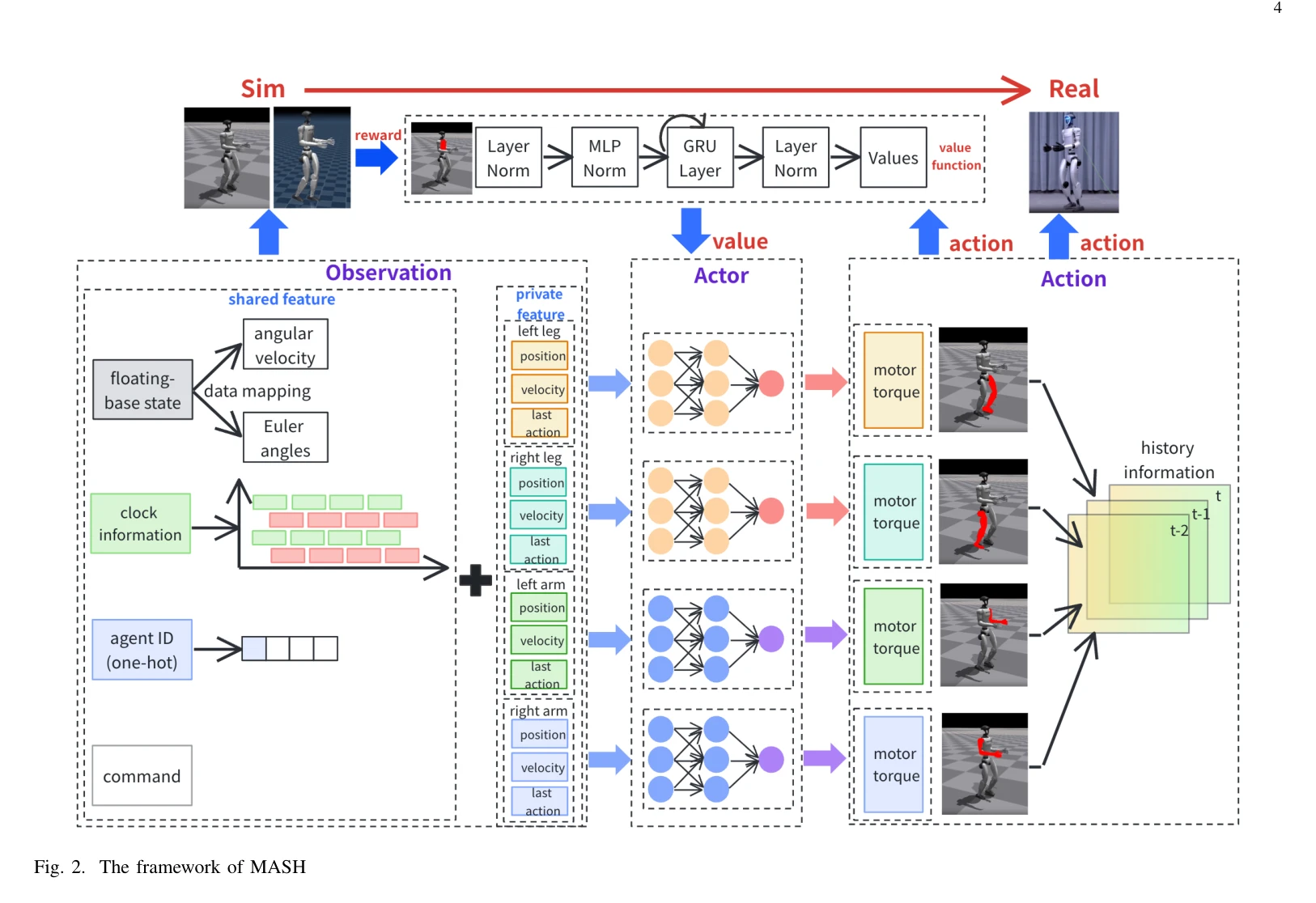
Fig. 2. The framework of MASH
총평: MASH는 MARL 원칙을 단일 인간형 로봇에 창의적으로 적용하여 전신 조화 보행 학습을 효과적으로 개선한 의미 있는 기여이다. 다만 실제 로봇 검증과 알고리즘 세부사항 명확화가 필요하다.