Essence
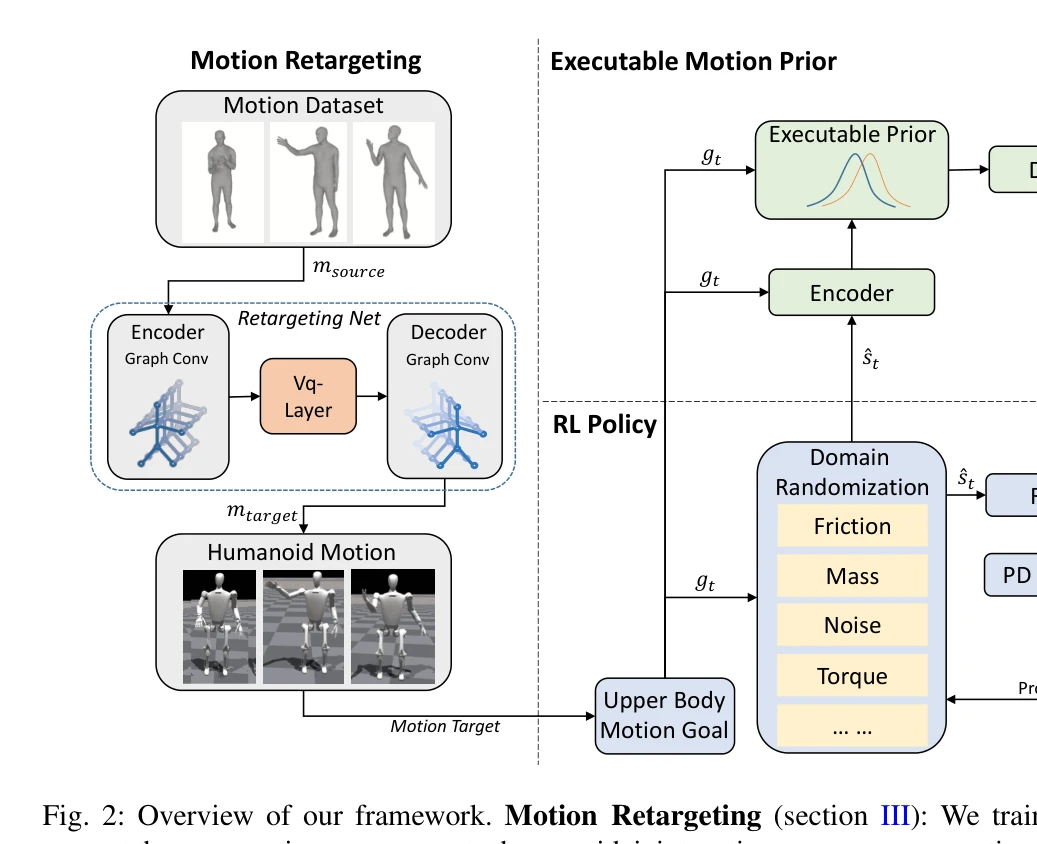
Fig. 2: Overview of our framework. Motion Retargeting (section III): We train a graph convolution retargeting network to
휴머노이드 로봇이 서 있는 자세를 유지하면서 인간의 상체 동작을 모방하기 위해 강화학습과 Executable Motion Prior(EMP) 모듈을 결합한 프레임워크를 제안한다.
저자: Haocheng Xu, Haodong Zhang, Zhenghan Chen, Rong Xiong | 날짜: 2025-07-21 | URL: https://arxiv.org/abs/2507.15649 📄 PDF
Fig. 2: Overview of our framework. Motion Retargeting (section III): We train a graph convolution retargeting network to
휴머노이드 로봇이 서 있는 자세를 유지하면서 인간의 상체 동작을 모방하기 위해 강화학습과 Executable Motion Prior(EMP) 모듈을 결합한 프레임워크를 제안한다.
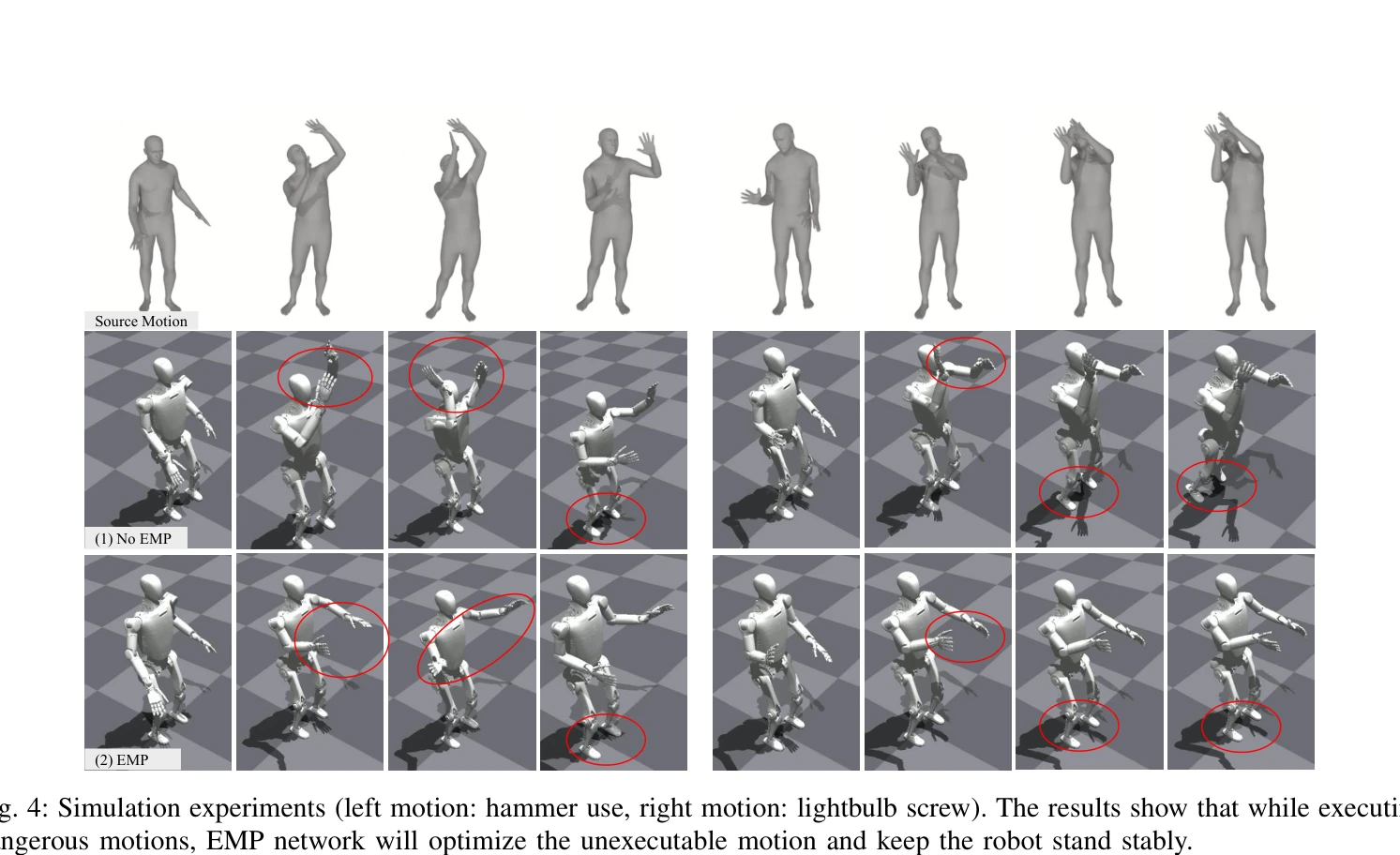
Fig. 4: Simulation experiments (left motion: hammer use, right motion: lightbulb screw). The results show that while exe
Fig. 2: Overview of our framework. Motion Retargeting (section III): We train a graph convolution retargeting network to
총평: 이 논문은 RL과 동작 prior를 결합하여 휴머노이드 로봇의 안정적인 상체 동작 모방을 실현하는 실용적인 솔루션을 제시하며, 실제 로봇 배포를 통해 그 효과를 입증한 우수한 연구이다.