Essence
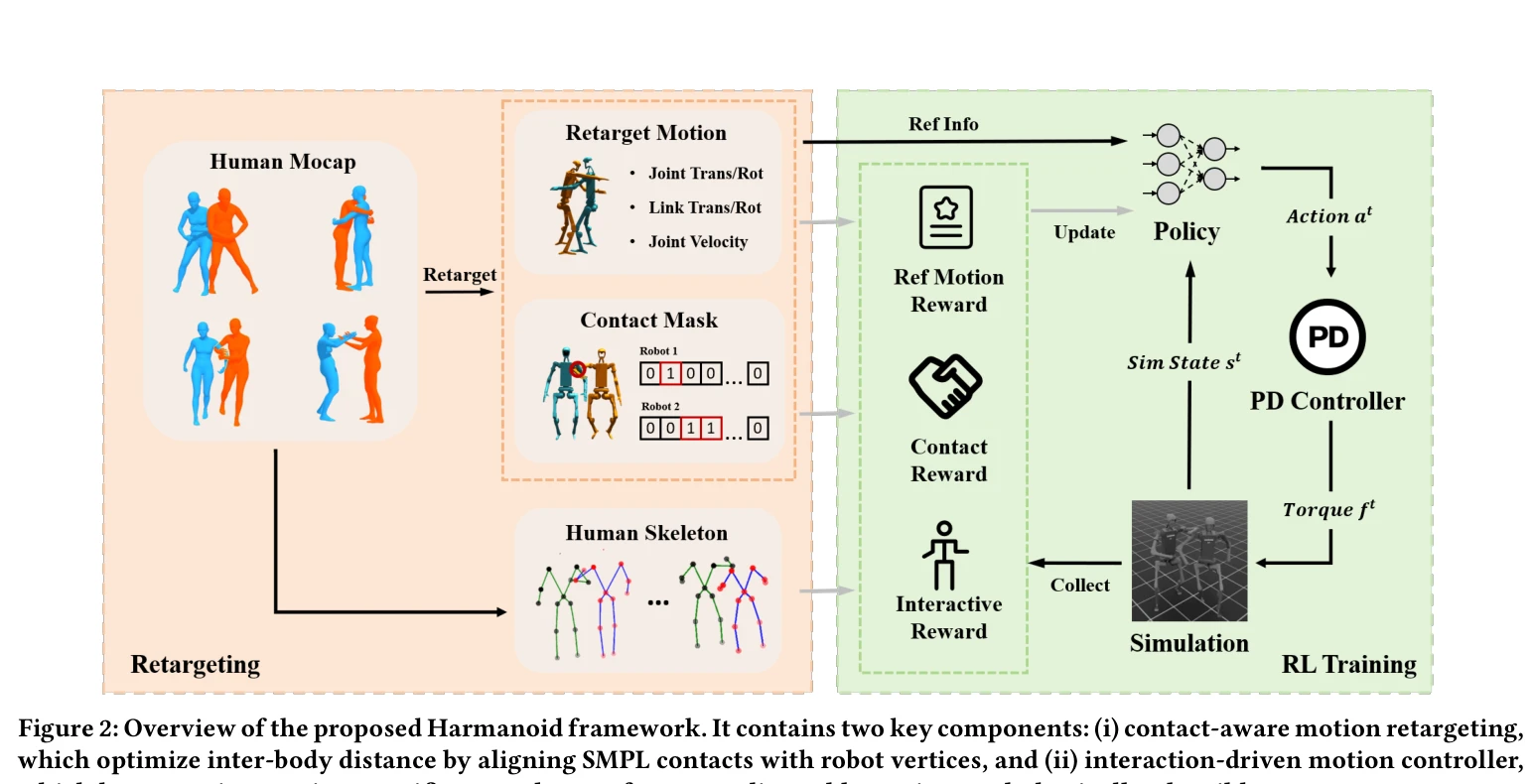
Figure 2: Overview of the proposed Harmanoid framework. It contains two key components: (i) contact-aware motion retarge
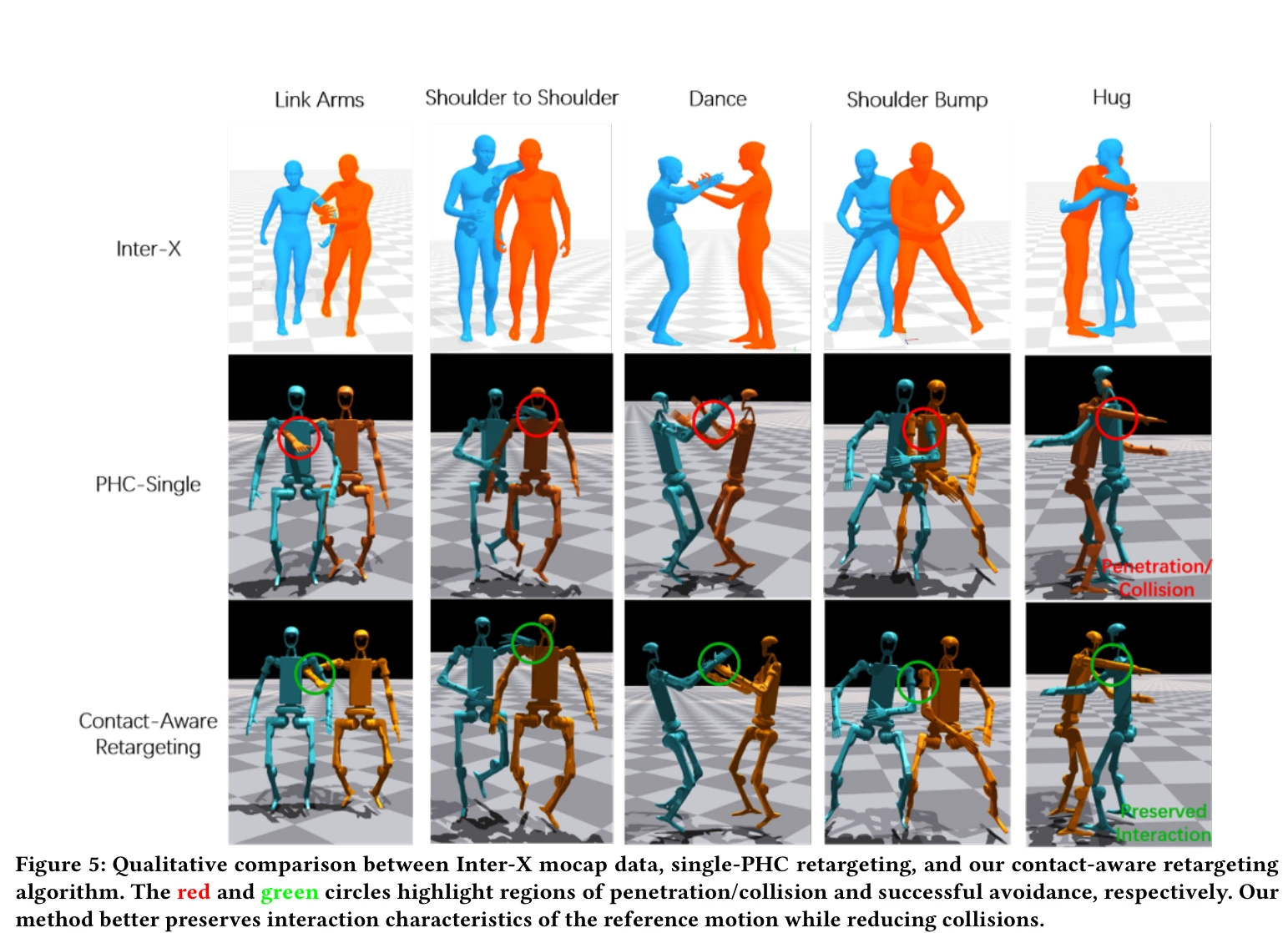
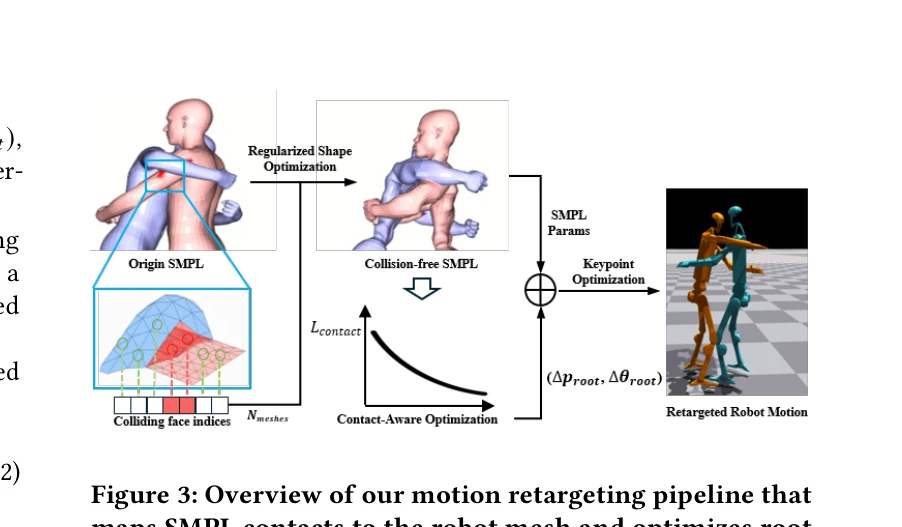
Harmanoid는 두 개의 휴머노이드 로봇 간 상호작용 동작을 모방하는 프레임워크로, 접촉 인식 motion retargeting과 상호작용 기반 motion controller를 통해 키네마틱 충실도와 물리적 현실성을 동시에 보존한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: Harmanoid는 다중 휴머노이드 상호작용 동작 모방의 명확한 문제를 체계적으로 해결하며, contact-aware retargeting과 interaction-aware control의 결합으로 고립 문제를 효과적으로 극복하는 첫 프레임워크이다. 종합적인 실험과 우수한 성능으로 humanoid robotics 분야에 중요한 기여를 하나, sim-to-real 검증 부재와 2-agent 제한이 실제 적용의 완전성을 제약한다.