Essence
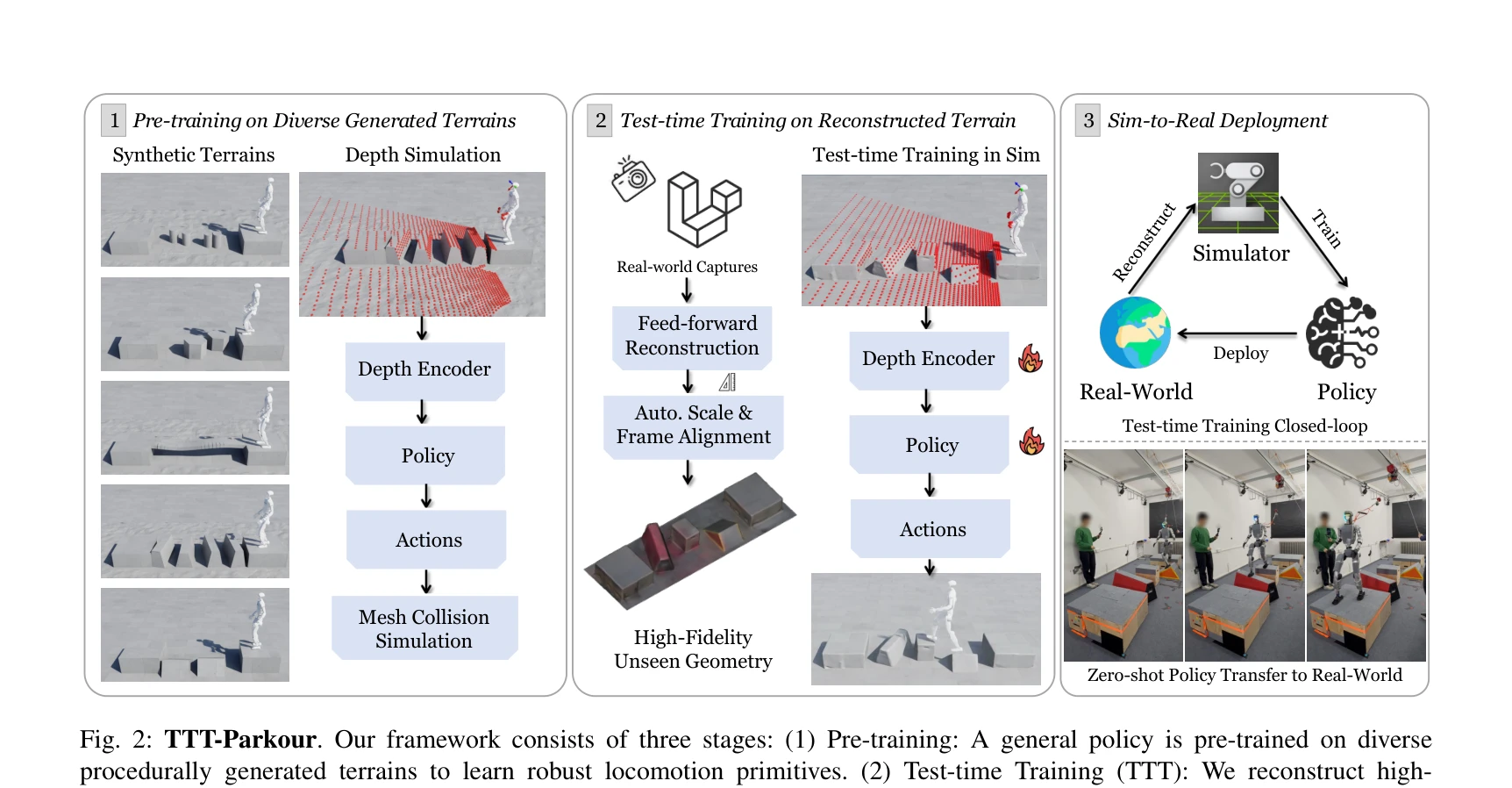
Fig. 2: TTT-Parkour. Our framework consists of three stages: (1) Pre-training: A general policy is pre-trained on divers
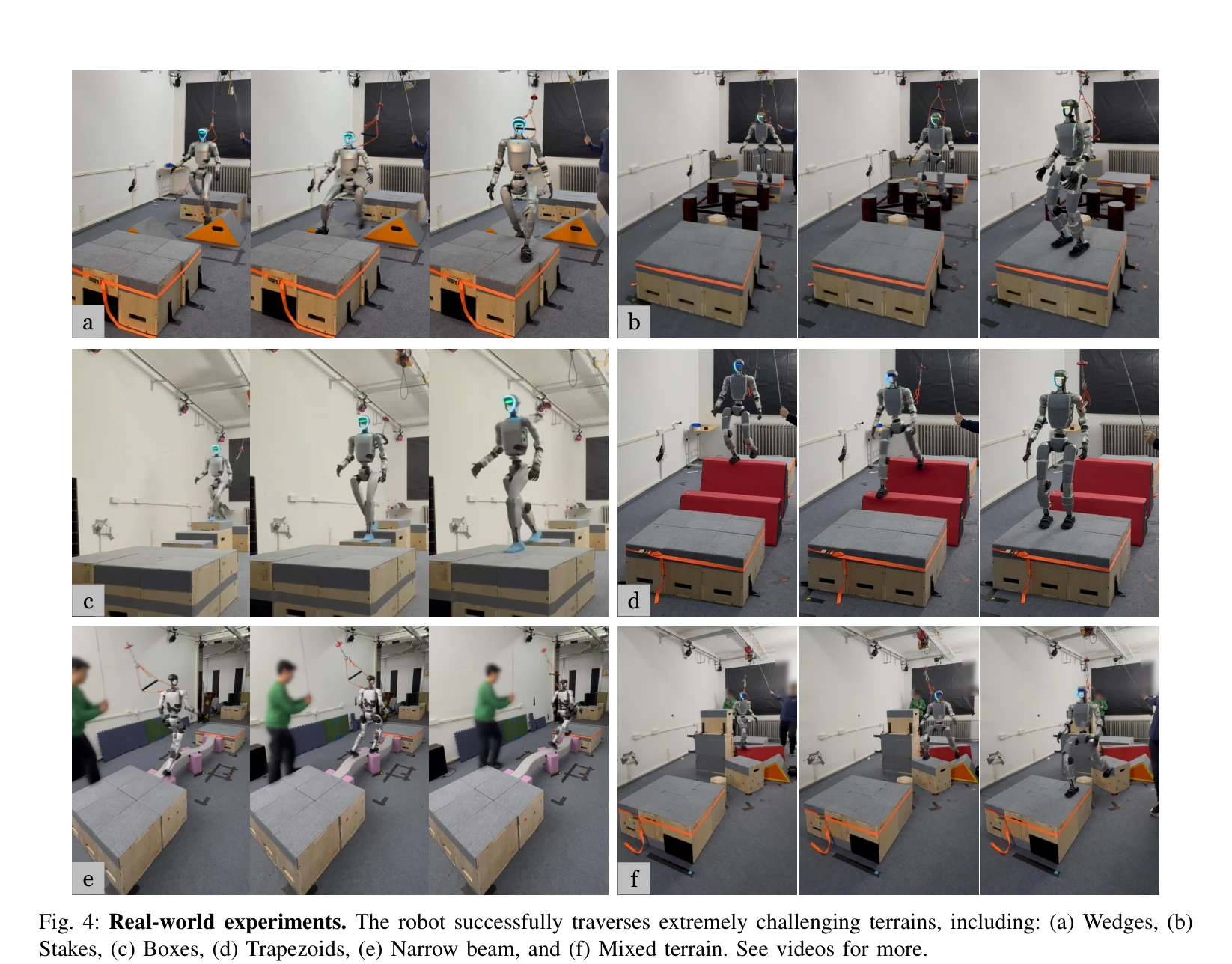
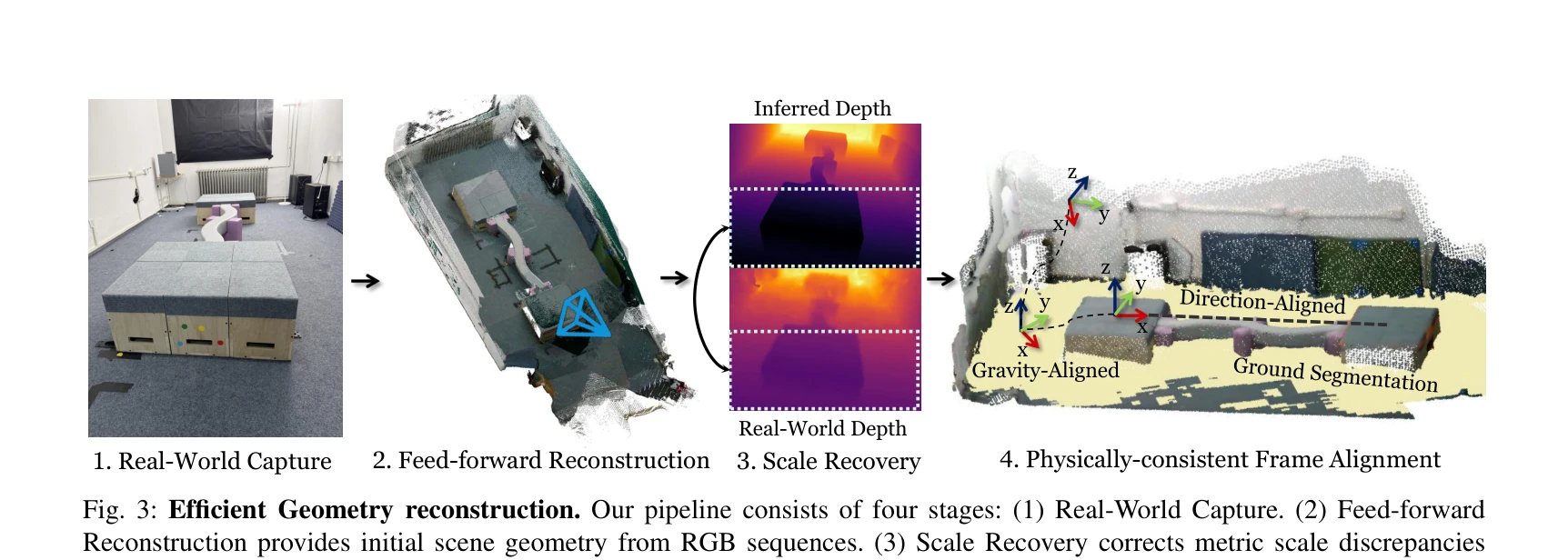
본 논문은 RGB-D 입력으로부터 고충실도 메시 재구성을 통해 미지의 복잡한 지형에서 휴머노이드 로봇의 빠른 테스트 시간 파인튜닝(TTT)을 가능하게 하는 real-to-sim-to-real 프레임워크를 제안한다.