Essence
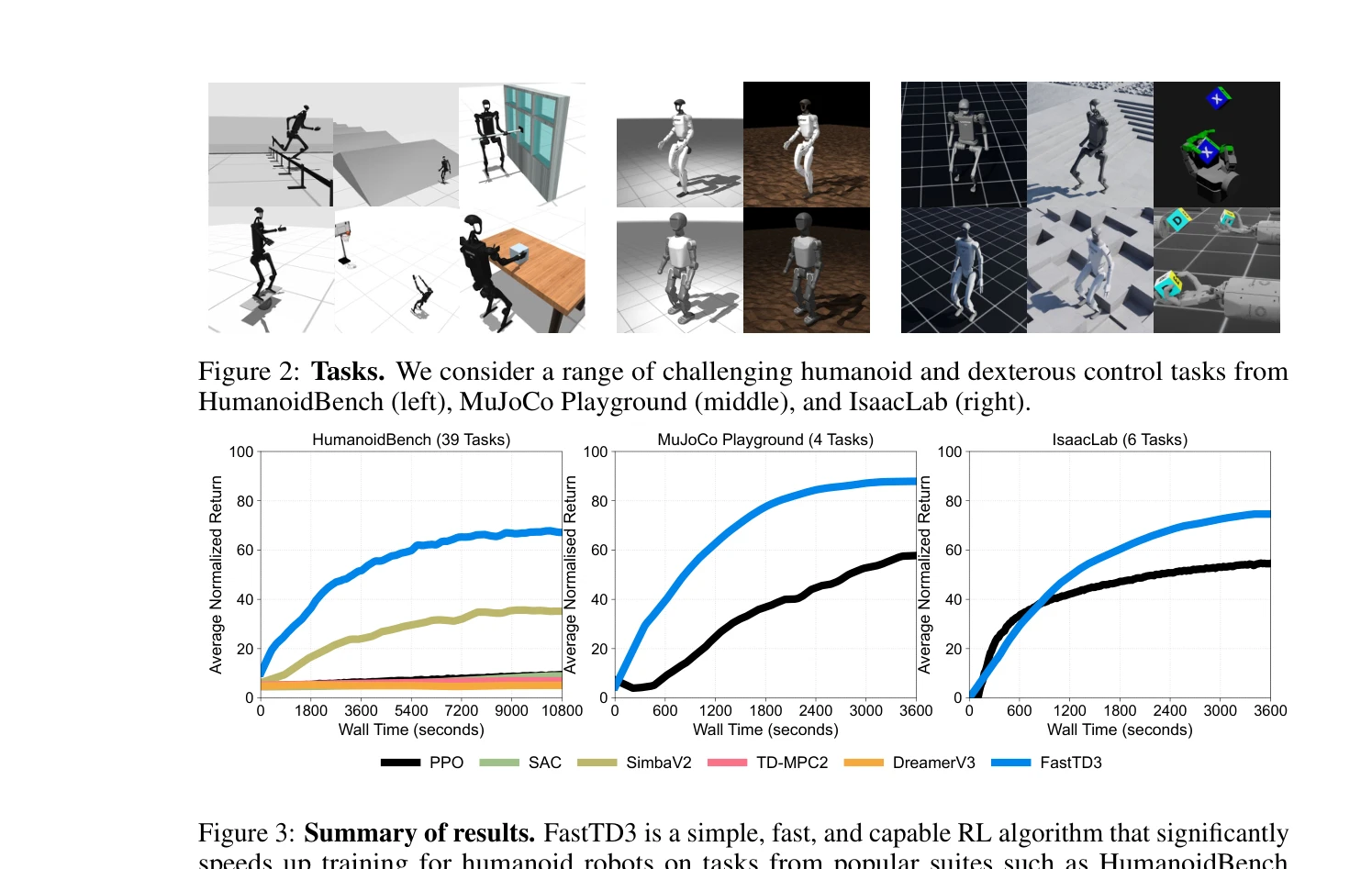
Figure 3: Summary of results. FastTD3 is a simple, fast, and capable RL algorithm that significantly
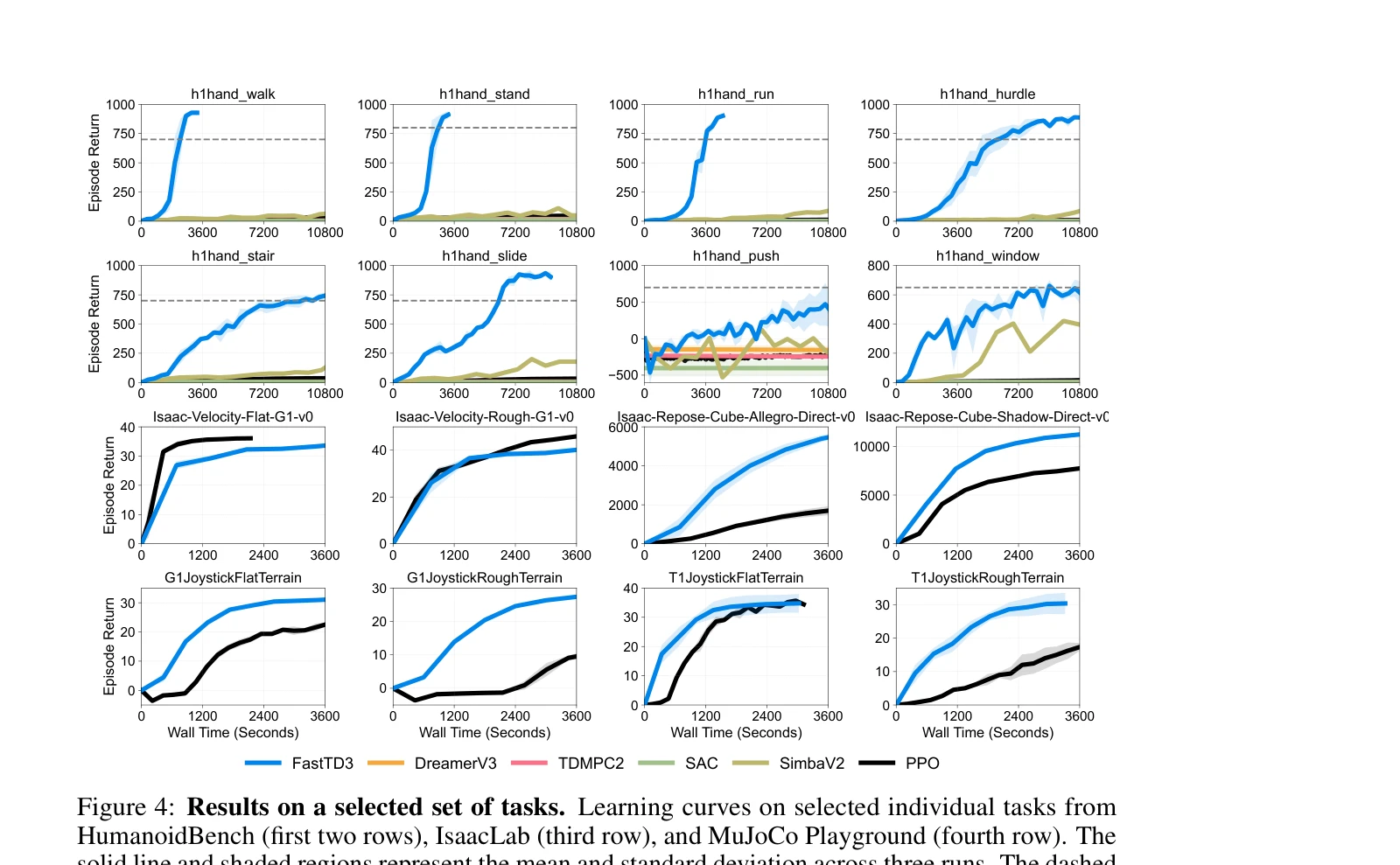
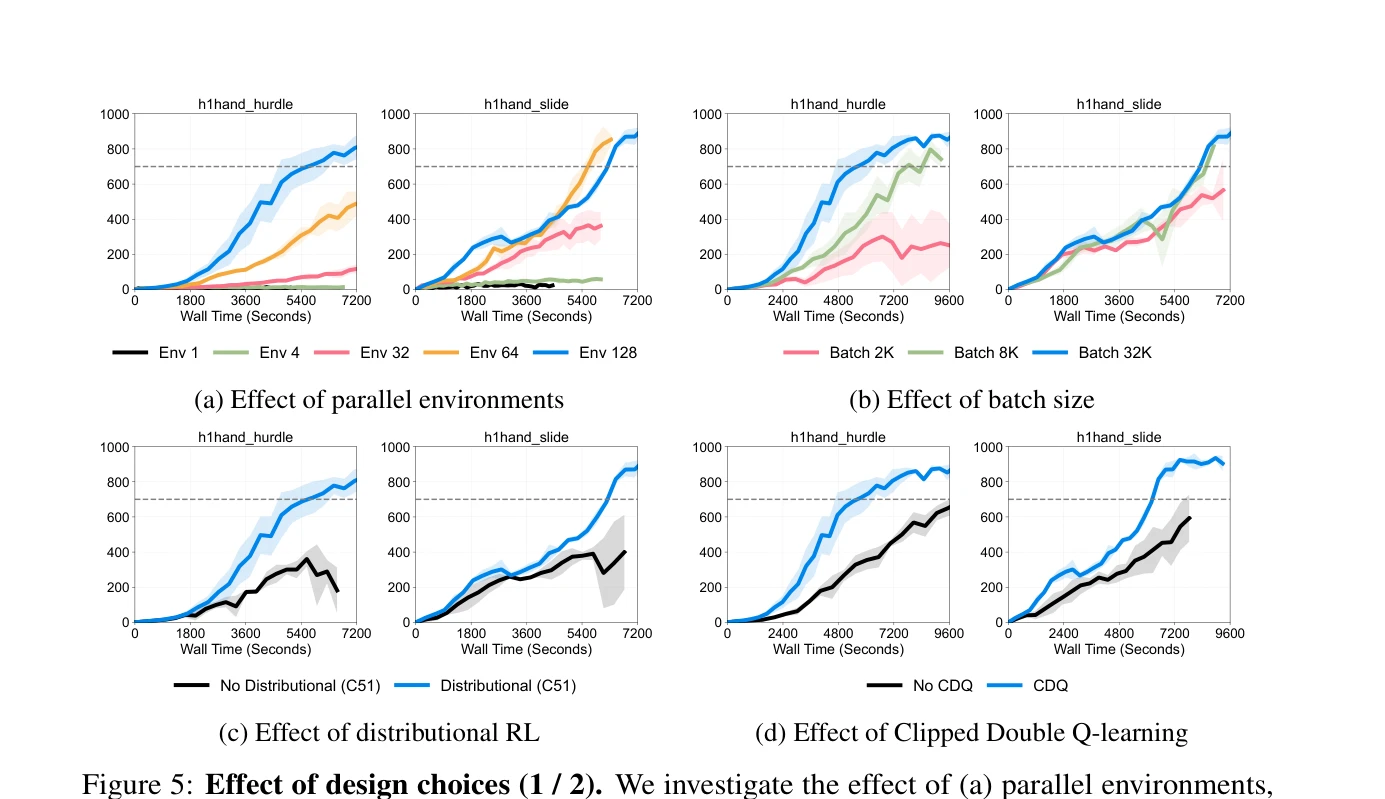
FastTD3는 병렬 시뮬레이션, 대배치 업데이트, 분포 기반 크리틱 등의 간단한 수정을 통해 TD3를 최적화하여 humanoid 로봇 제어 태스크를 단일 A100 GPU에서 3시간 이내에 학습하는 빠르고 효율적인 오프-정책 강화학습 알고리즘을 제시한다.
Evaluation
Novelty: 3/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: FastTD3는 기존 기법의 조합이지만 humanoid robotics에서 실무적으로 매우 유용한 간단하고 빠른 솔루션을 제공하며, 오픈소스 구현을 통해 RL 연구 커뮤니티의 접근성을 크게 향상시킨다. 다만 알고리즘 혁신보다는 엔지니어링 최적화에 중점을 두고 있어 과학적 원창성은 제한적이다.