저자: Zhen Wu, Xiaoyu Huang, Lujie Yang, Yuanhang Zhang, Koushil Sreenath, Xi Chen, Pieter Abbeel, Rocky Duan, Angjoo Kanazawa, Carmelo Sferrazza, Guanya Shi, C. Karen Liu | 날짜: 2026-02-17 | DOI: 10.48550/arXiv.2602.15827 📄 PDF
Essence
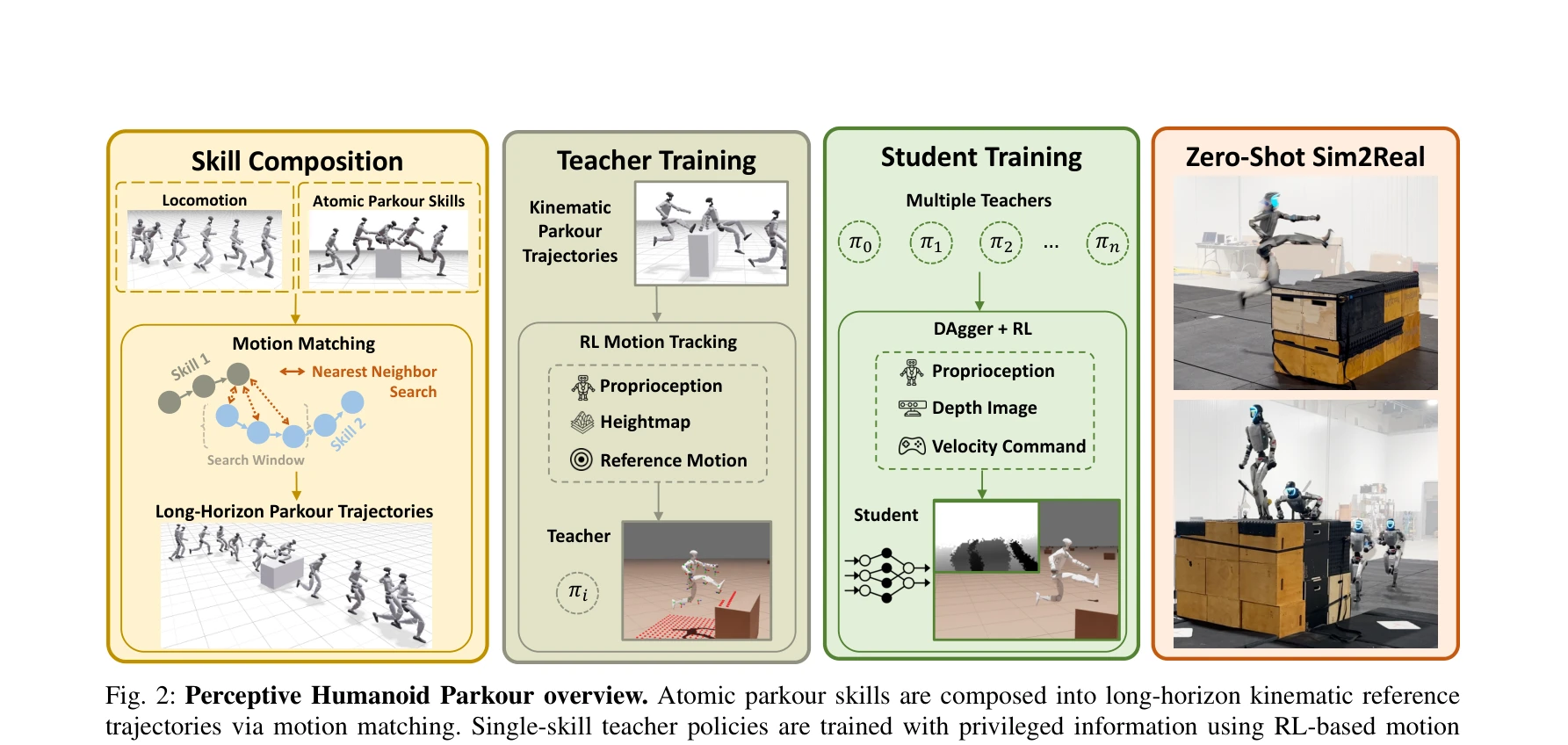
Fig. 2: Perceptive Humanoid Parkour overview. Atomic parkour skills are composed into long-horizon kinematic reference
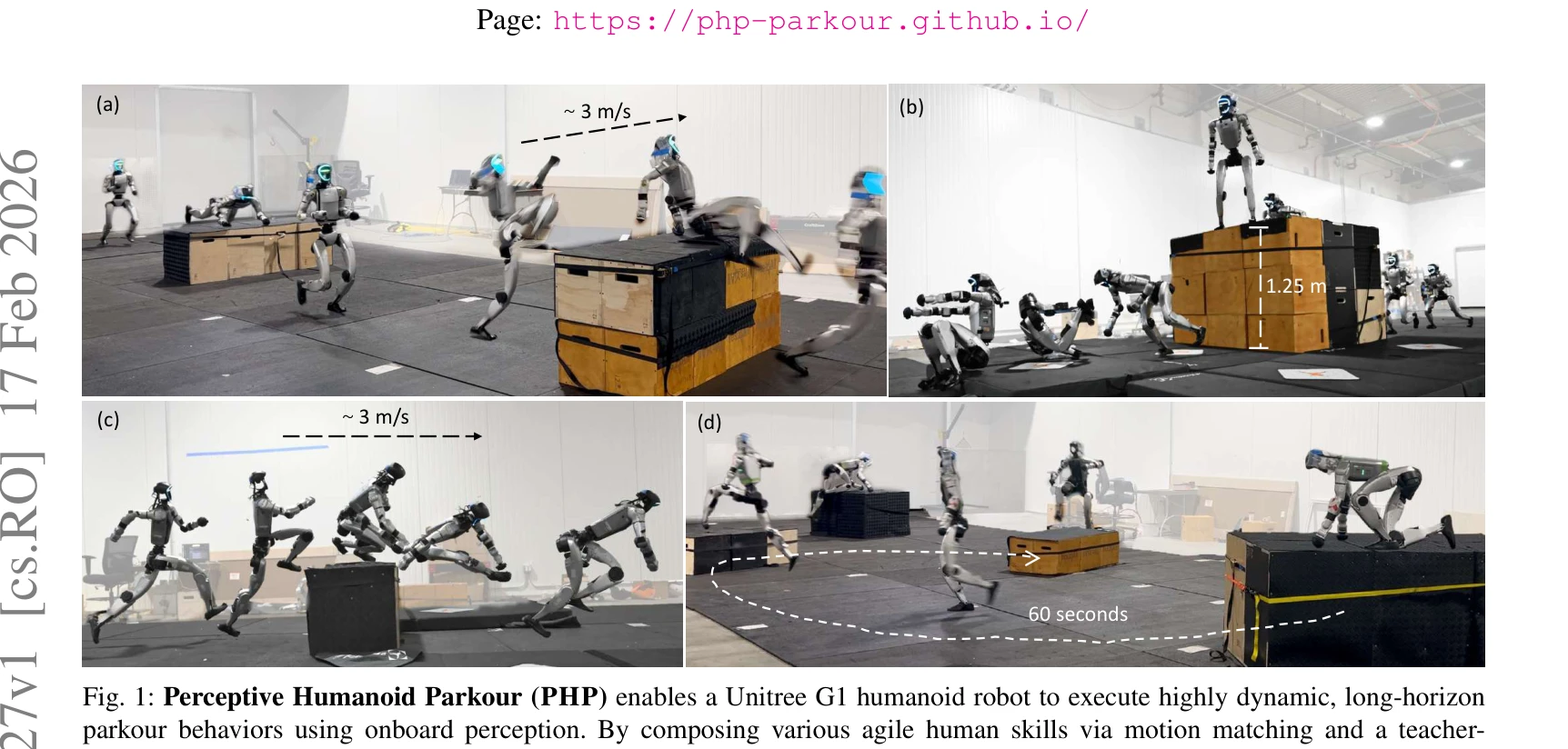
Motion matching을 통해 인간의 동작 데이터를 원자적 기술로 합성하고, DAgger와 RL을 결합한 teacher-student 파이프라인으로 단일 깊이 기반 정책으로 증류하여 휴머노이드 로봇이 복잡한 장애물 코스에서 자율적으로 장시간 파쿠르를 수행하도록 한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 연구는 motion matching과 hybrid DAgger-RL 증류를 통해 희소한 인간 동작 데이터로부터 복잡한 파쿠르 기술을 효과적으로 합성 및 학습하여 휴머노이드 로봇의 동적 환경 적응 능력을 획기적으로 향상시켰으며, 실제 로봇에서의 강인한 구현과 zero-shot sim-to-real 전이는 높은 실용적 가치를 입증한다.