저자: Jiacheng Liu, Pengxiang Ding, Qihang Zhou, Yuxuan Wu, Da Huang, Zimian Peng, Wei Xiao, Weinan Zhang, Lixin Yang, Cewu Lu, Donglin Wang | 날짜: 2026-03-19 | DOI: 10.48550/arXiv.2509.11839 📄 PDF
Essence
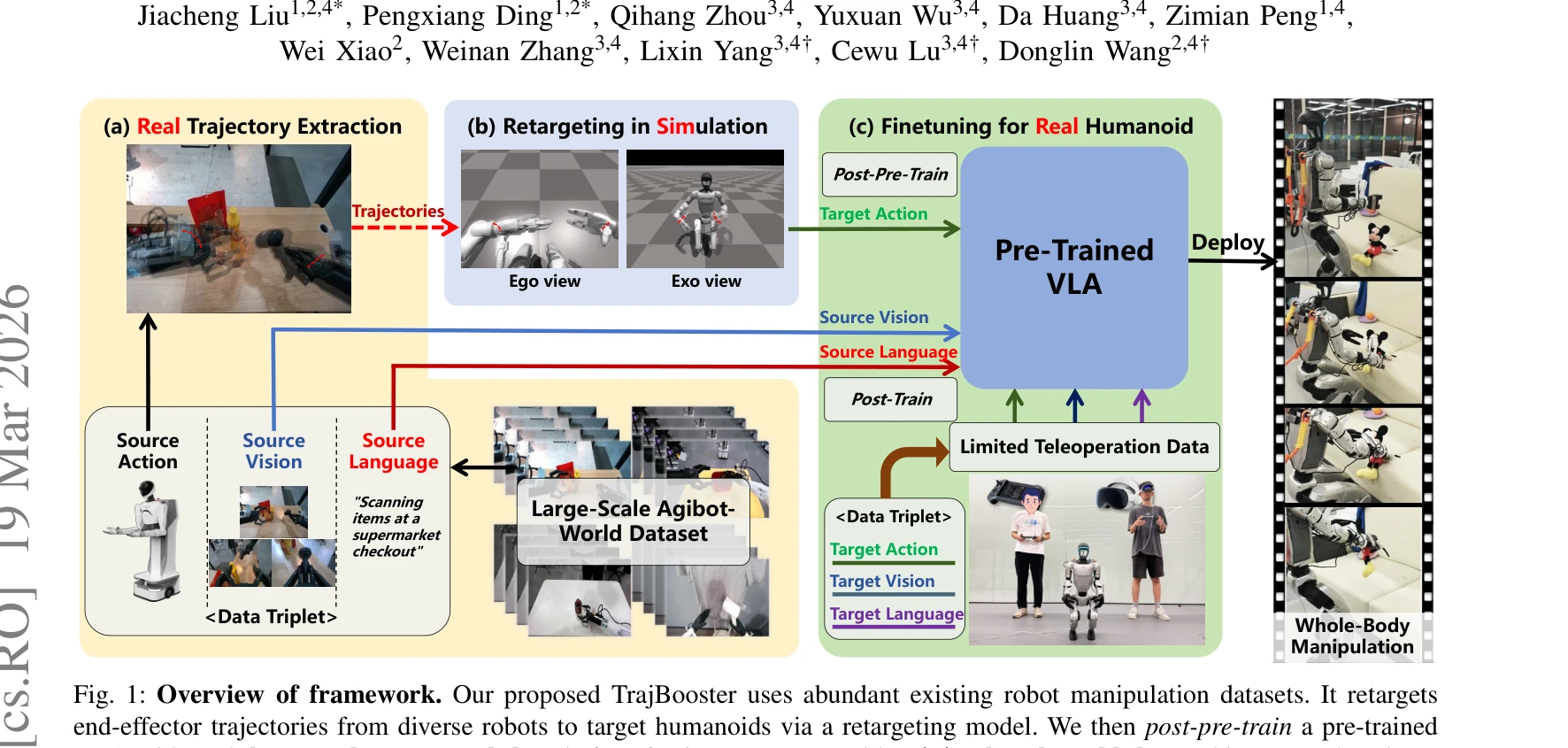
Fig. 1: Overview of framework. Our proposed TrajBooster uses abundant existing robot manipulation datasets. It retargets
TrajBooster는 휠드 휴머노이드에서 추출한 다양한 궤적 데이터를 이족 휴머노이드(Unitree G1)로 전이학습하여, 부족한 이족 휴머노이드 데이터를 보충하고 Vision-Language-Action 모델의 성능을 향상시키는 실시간-시뮬레이션-실시간 파이프라인이다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: TrajBooster는 형태학적으로 다른 로봇 간 전이학습이라는 어려운 문제에 대해 실용적이고 효과적인 해결책을 제시한다. 최소한의 실제 데이터만으로도 이족 휴머노이드의 광범위한 전신 조작을 가능하게 한 점에서 로봇 학습의 실용성 측면에서 매우 중요한 기여를 한다.