저자: Zhenghan Chen, Haocheng Xu, Haodong Zhang, Liang Zhang, He Li, Dongqi Wang, Jiyu Yu, Yifei Yang, Zhongxiang Zhou, Rong Xiong | 날짜: 2025-08-01 | URL: https://arxiv.org/abs/2508.00355 📄 PDF
Essence
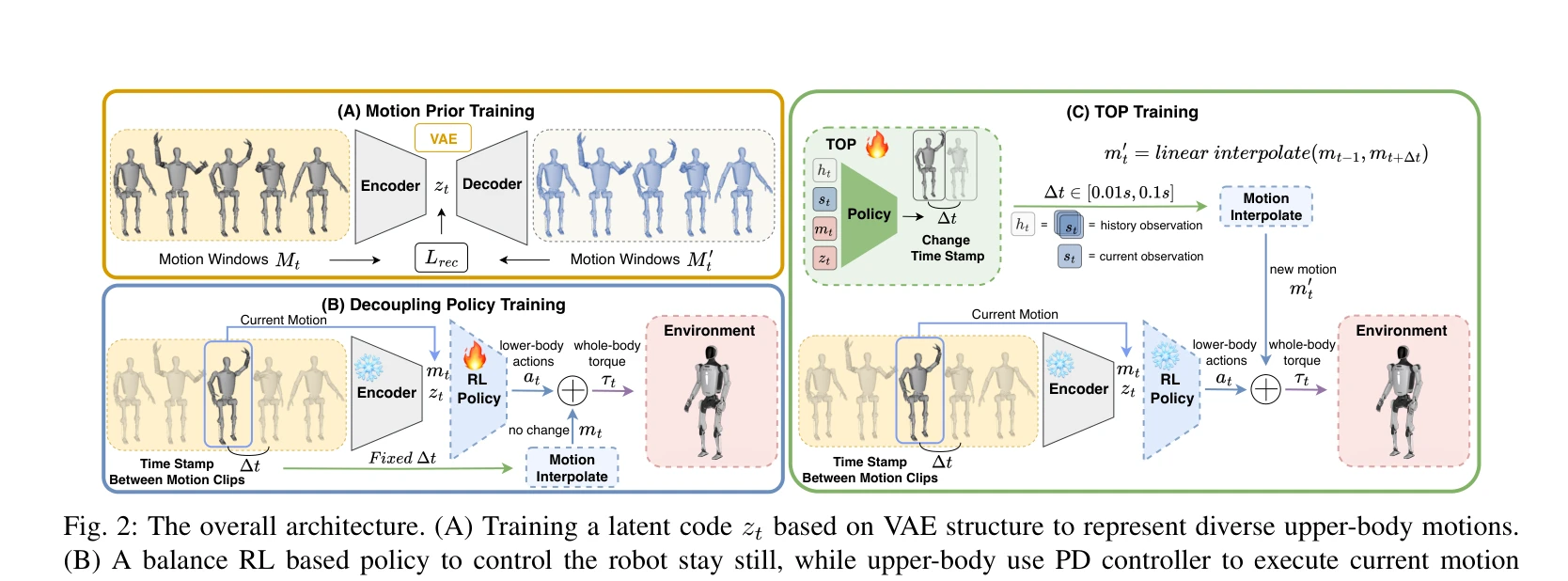
Fig. 2: The overall architecture. (A) Training a latent code zt based on VAE structure to represent diverse upper-body m
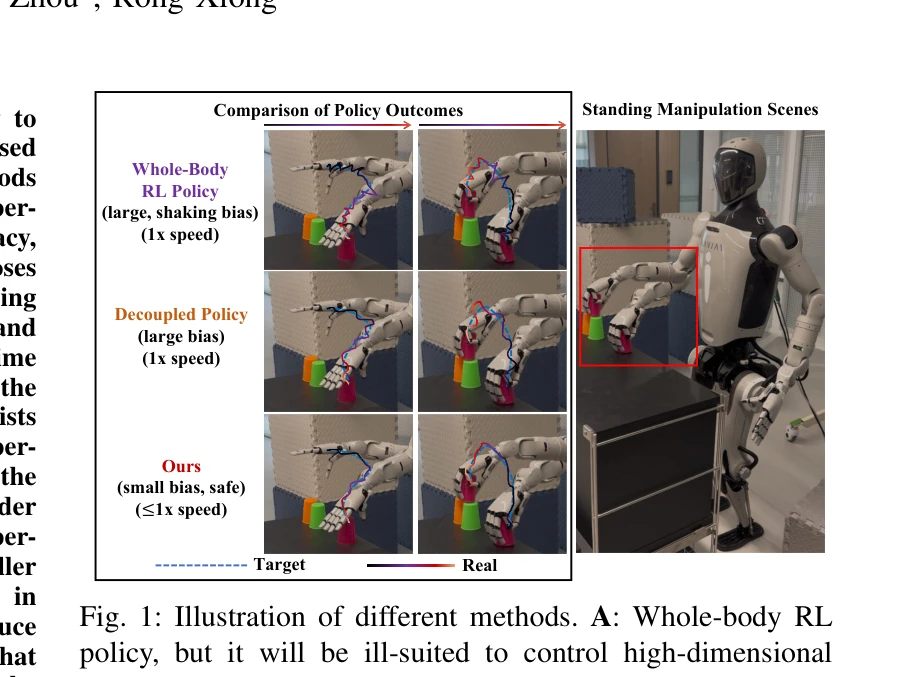
이 논문은 휴머노이드 로봇의 안정적인 서서하기 조작을 위해 상체 동작의 시간 궤적을 최적화하는 Time Optimization Policy (TOP)을 제안한다. 상체의 빠른 움직임으로 인한 모멘텀을 줄여 균형, 정확성, 시간 효율성을 동시에 달성한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 이 논문은 상체 동작 시간 최적화라는 직관적이면서도 효과적인 아이디어로 휴머노이드 서서하기 조작의 안정성-정확성-효율성 trade-off 문제를 창의적으로 해결한다. 이론과 실험이 잘 결합되어 있으며, humanoid 로봇 제어 분야에 실질적인 기여를 제공한다.