Essence
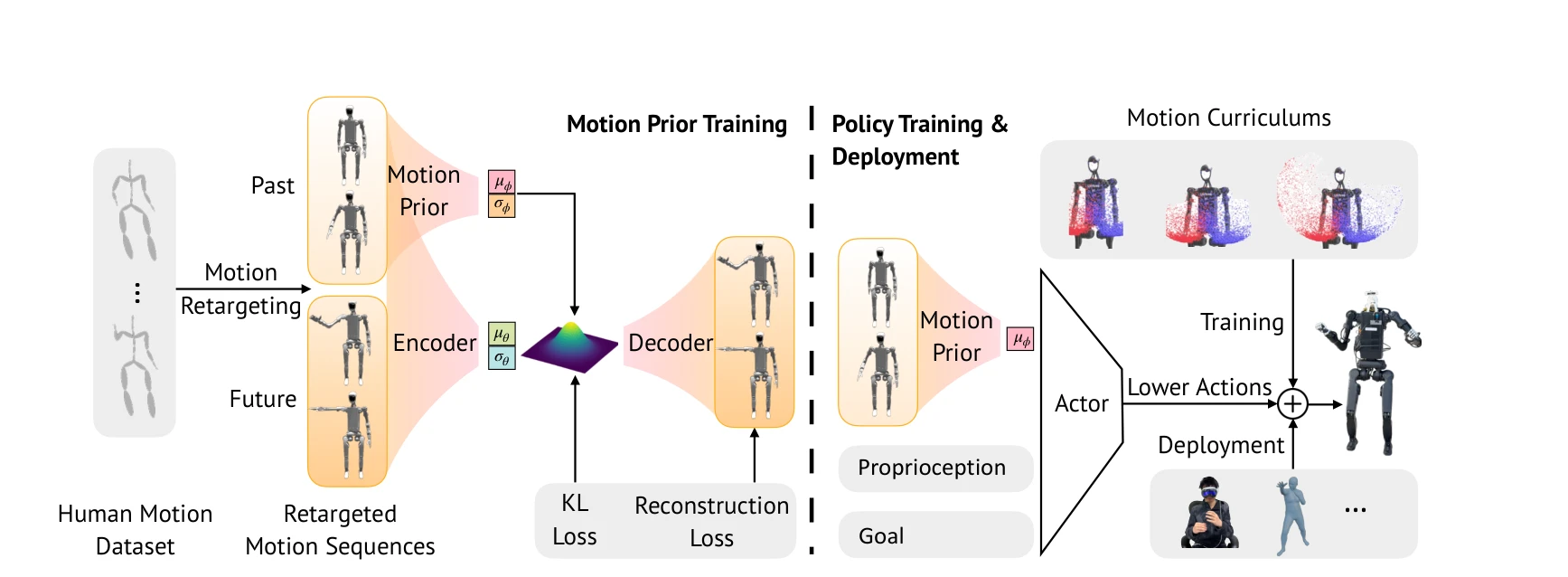
Fig. 2: The training pipeline consists of three stages: (a) preprocessing of the motion dataset by mapping local rotatio
휴머노이드 로봇의 전신 제어를 위해 상체 조작과 하체 보행을 분리하고, CVAE 기반 Predictive Motion Priors (PMP)를 사용하여 상체의 정밀한 조작과 하체의 강건한 보행을 동시에 달성한다.
저자: Chenhao Lu, Xuxin Cheng, Jialong Li, Shiqi Yang, Mazeyu Ji, Chengjing Yuan, Ge Yang, Sha Yi, Xiaolong Wang | 날짜: 2024-12-10 | URL: https://arxiv.org/abs/2412.07773 📄 PDF
Fig. 2: The training pipeline consists of three stages: (a) preprocessing of the motion dataset by mapping local rotatio
휴머노이드 로봇의 전신 제어를 위해 상체 조작과 하체 보행을 분리하고, CVAE 기반 Predictive Motion Priors (PMP)를 사용하여 상체의 정밀한 조작과 하체의 강건한 보행을 동시에 달성한다.

Fig. 1: Humanoid robot doing whole-body tasks that require both precise manipulation and robust locomotion. The robot
Fig. 2: The training pipeline consists of three stages: (a) preprocessing of the motion dataset by mapping local rotatio
총평: 상체 정밀 조작과 하체 강건 보행이라는 근본적으로 다른 요구를 효과적으로 분리하면서도 CVAE 기반 motion prior를 통해 통합하는 창의적 접근으로, 고 DoF 팔 제어에서 기존 전신 RL 방법을 명확히 능가한다. 실세계 텔레오퍼레이션 가능성까지 보여주어 실용성이 높은 연구이다.