Essence
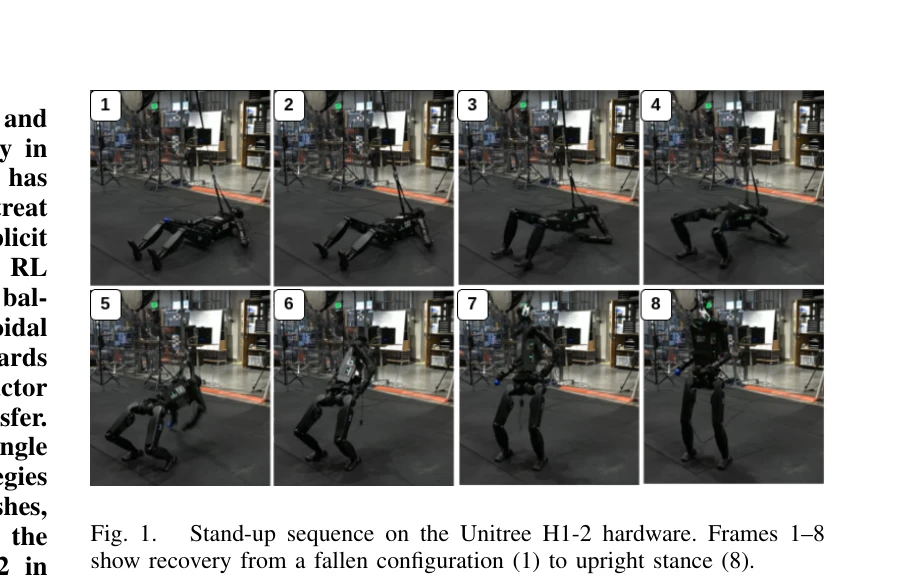
Fig. 1.
고전적 균형 제어 원리(capture point, center-of-mass, centroidal momentum)를 강화학습의 privileged critic 입력과 보상 형성에 직접 임베딩하여, 인간형 로봇의 낙상 회복을 위한 통합 정책을 학습한다. 단일 정책으로 발목/엉덩이 전략, 보정 스텝, 다중접촉 일어서기를 포괄하며 93.4% 회복률을 달성한다.
저자: Nehar Poddar, Stephen McCrory, Luigi Penco, Geoffrey Clark, Hakki Erhan Svil, Robert Griffin | 날짜: 2026-03-09 | DOI: 10.48550/arXiv.2603.08619 📄 PDF
Fig. 1.
고전적 균형 제어 원리(capture point, center-of-mass, centroidal momentum)를 강화학습의 privileged critic 입력과 보상 형성에 직접 임베딩하여, 인간형 로봇의 낙상 회복을 위한 통합 정책을 학습한다. 단일 정책으로 발목/엉덩이 전략, 보정 스텝, 다중접촉 일어서기를 포괄하며 93.4% 회복률을 달성한다.
Fig. 1.
총평: 본 논문은 고전적 균형 제어 원리를 강화학습에 체계적으로 임베딩하는 creative한 접근으로, ablation을 통해 이 구조의 필수성을 입증하고 93.4% 회복률로 강력한 실증 결과를 제시한다. 다만 하드웨어 검증 규모와 다양한 환경에서의 일반화 평가가 보강되면 더욱 설득력 있을 것이다.