Essence
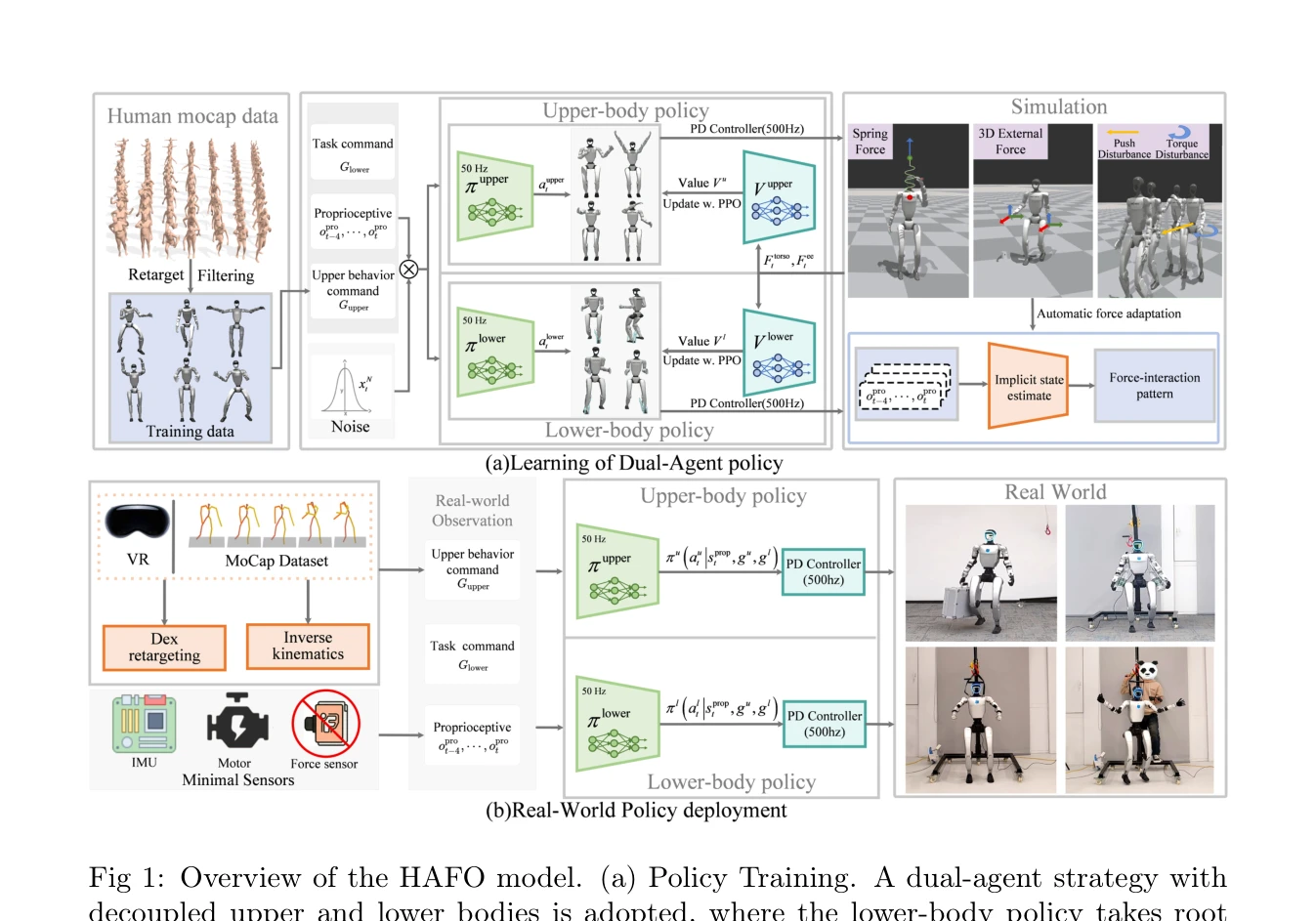
Fig 1: Overview of the HAFO model. (a) Policy Training. A dual-agent strategy with
HAFO는 dual-agent RL 프레임워크를 통해 humanoid robot의 하체 보행과 상체 조작을 동시에 최적화하여 강한 외력 상호작용 환경에서 안정적이고 정밀한 제어를 달성한다.
저자: Chenhui Dong, Haozhe Xu, Wenhao Feng, Zhipeng Wang, Yanmin Zhou, Yifei Zhao, Bin He | 날짜: 2026-01-29 | DOI: 10.48550/arXiv.2511.20275 📄 PDF
Fig 1: Overview of the HAFO model. (a) Policy Training. A dual-agent strategy with
HAFO는 dual-agent RL 프레임워크를 통해 humanoid robot의 하체 보행과 상체 조작을 동시에 최적화하여 강한 외력 상호작용 환경에서 안정적이고 정밀한 제어를 달성한다.
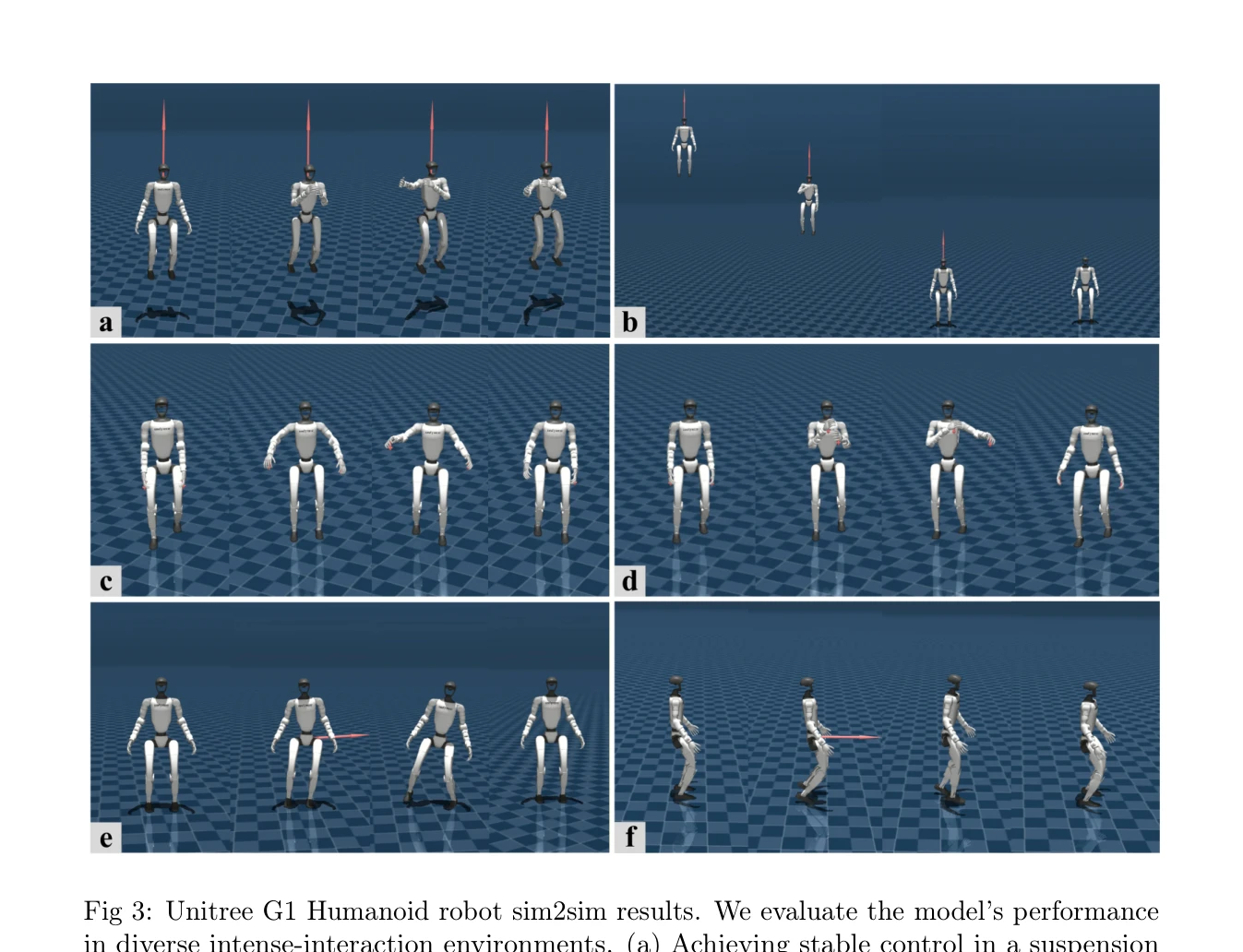
Fig 3: Unitree G1 Humanoid robot sim2sim results. We evaluate the model’s performance
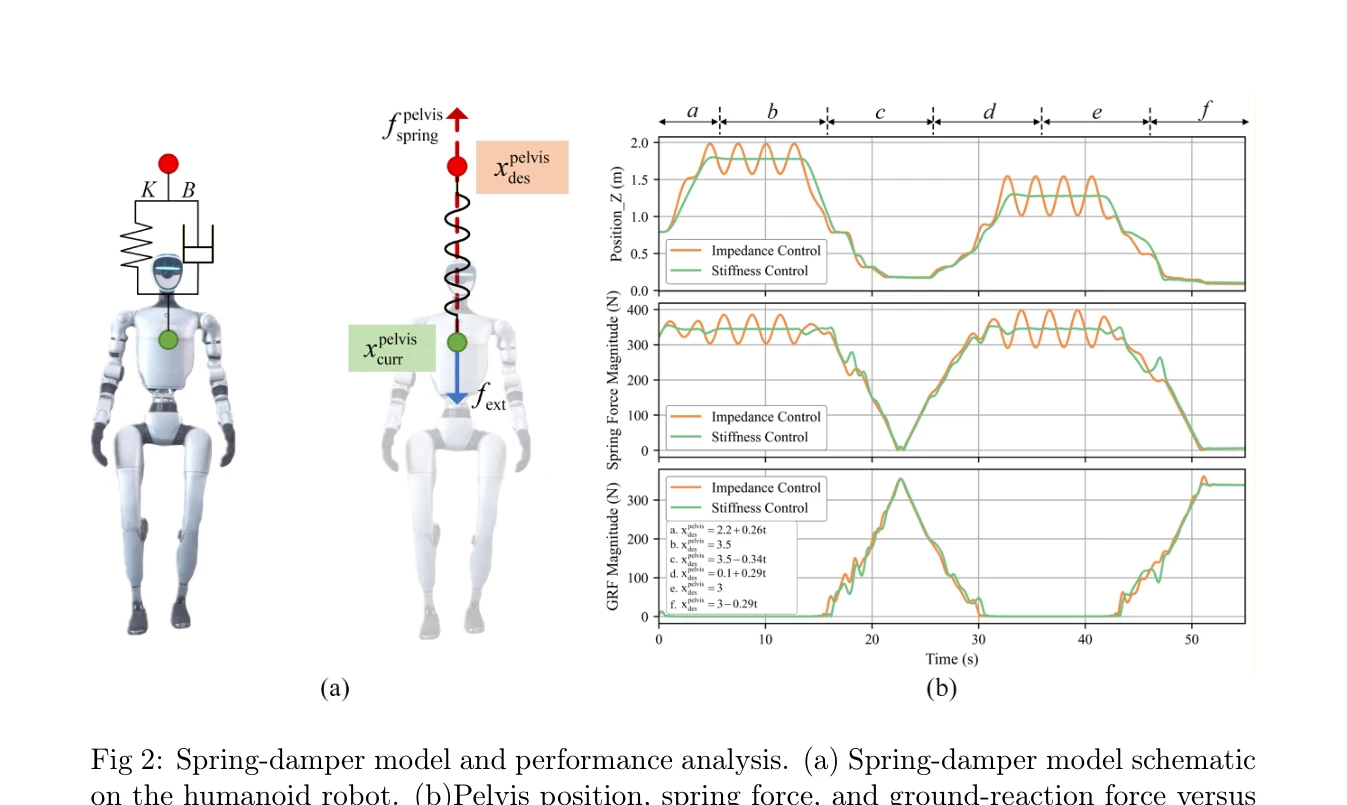
Fig 2: Spring-damper model and performance analysis. (a) Spring-damper model schematic
총평: HAFO는 spring-damper 모델과 dual-agent RL의 결합으로 humanoid robot의 강한 외력 적응 제어에서 새로운 기준을 제시하며, 특히 로프 현수라는 novel 응용에서 안정적 제어를 최초 달성한 의미 있는 연구다.