Essence
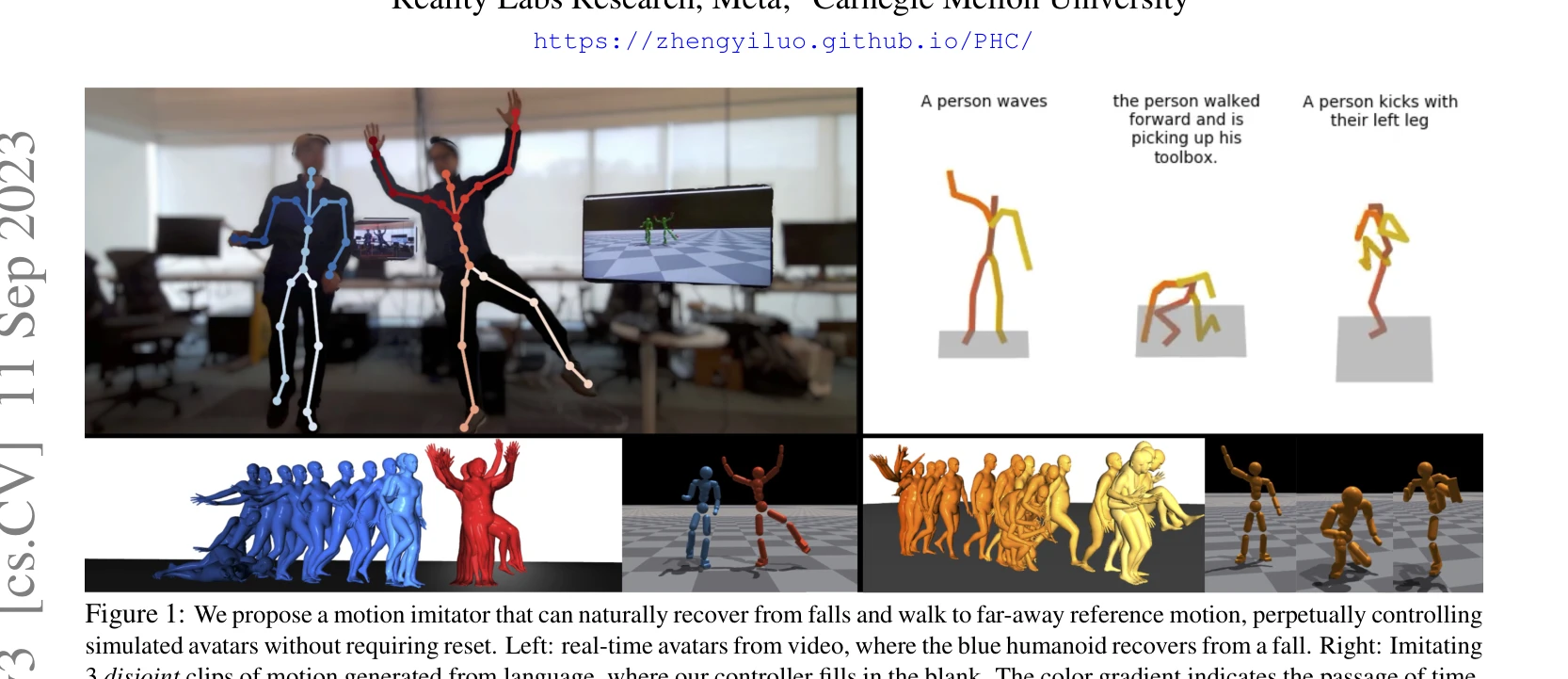
Figure 1: We propose a motion imitator that can naturally recover from falls and walk to far-away reference motion, perp
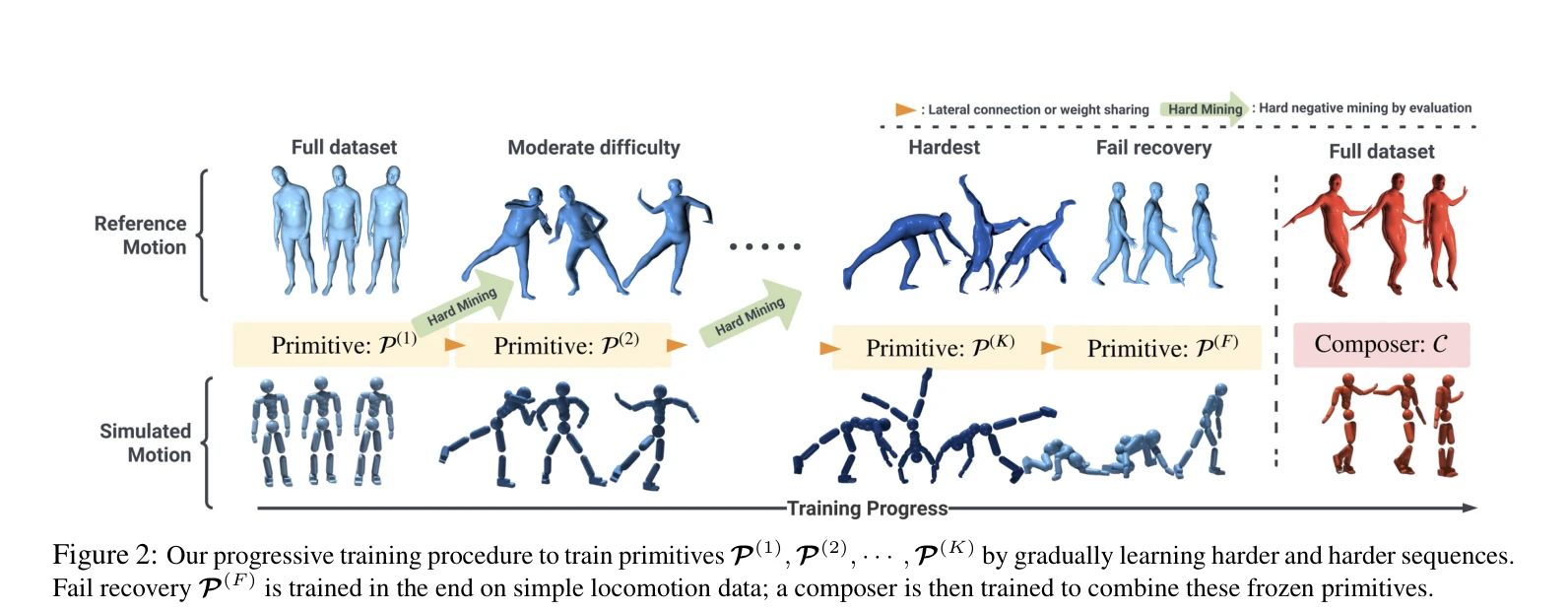
Physics 기반 humanoid controller인 Perpetual Humanoid Controller (PHC)는 noisy input과 unexpected falls에 강건하면서 10,000개의 motion clips을 학습할 수 있으며, 새로운 Progressive Multiplicative Control Policy (PMCP)를 통해 catastrophic forgetting 없이 대규모 motion database에서 학습 가능하다.