Essence
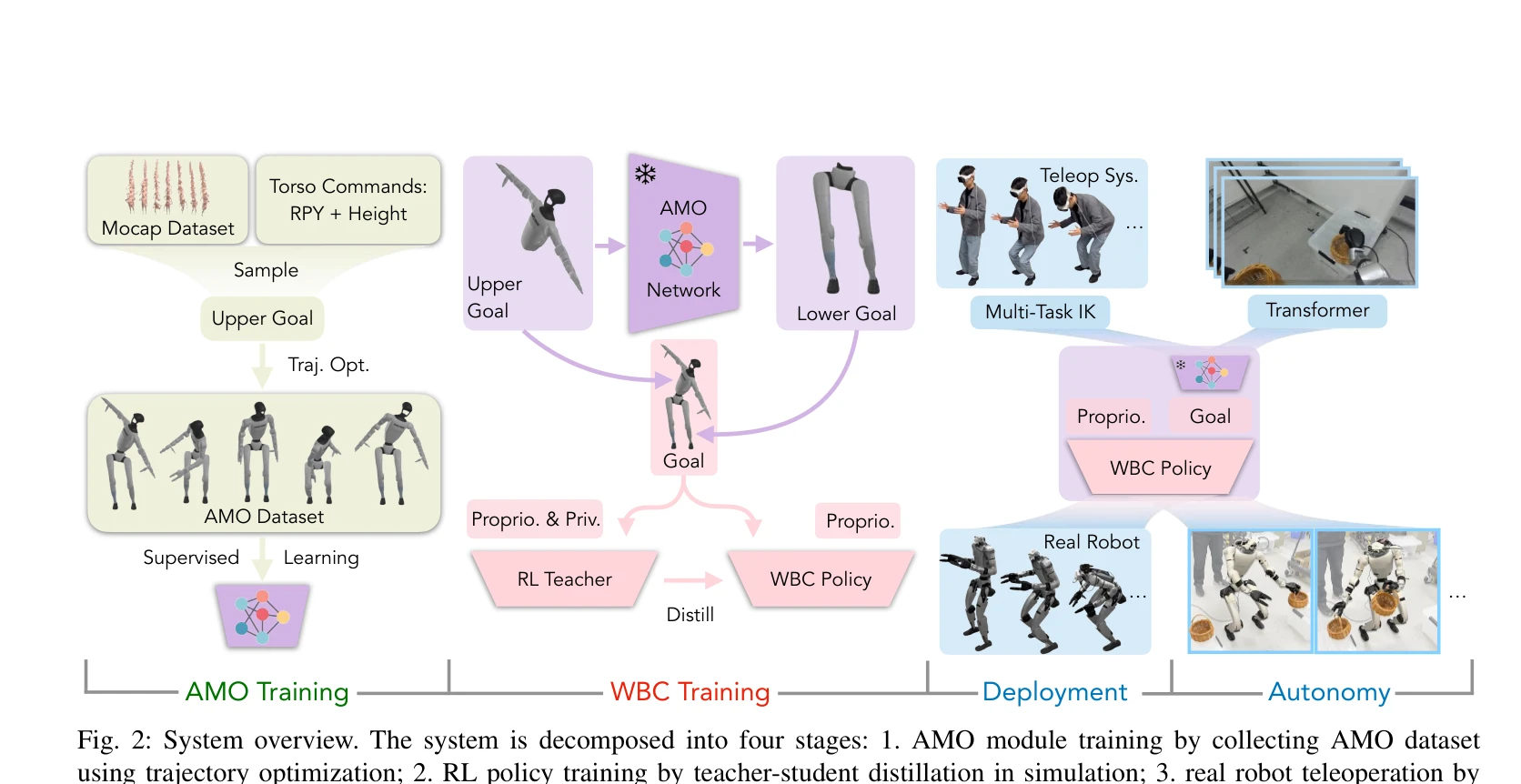
Fig. 2: System overview. The system is decomposed into four stages: 1. AMO module training by collecting AMO dataset
AMO는 sim-to-real RL과 trajectory optimization을 결합하여 29-DoF 인형로봇의 실시간 적응형 전신 제어를 구현하며, hybrid dataset 구성과 O.O.D. 명령에 대한 강건한 일반화를 통해 기존 방법의 운동 공간 제한을 극복한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: AMO는 hybrid motion synthesis와 O.O.D. robust 정책 학습을 통해 인형로봇의 운동 공간을 획기적으로 확대한 혁신적 연구로, MoCap과 trajectory optimization의 상보적 장점을 효과적으로 결합하며 sim-to-real transfer와 실시간 적응형 제어에서 탁월한 성과를 보여준다.