Essence
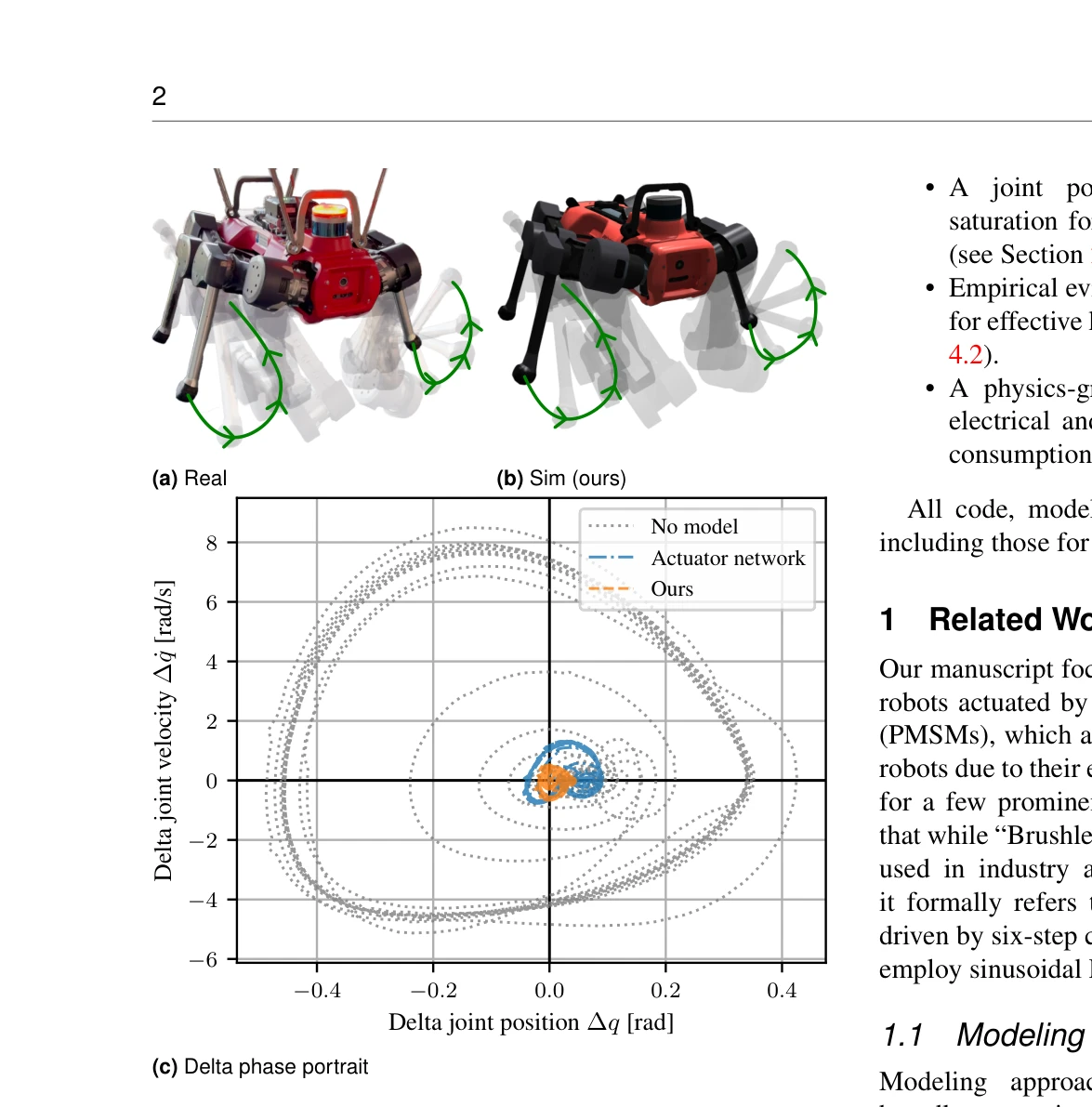
Figure 1. Comparison of real and simulated robot trajectories
이족 로봇의 시뮬레이션-실제 전이 문제를 해결하기 위해 강화학습과 영구자석 동기 전동기(PMSM)의 물리 기반 에너지 모델을 통합한 프레임워크를 제안하며, 최소한의 파라미터로 현실성을 확보하면서 에너지 효율성을 달성한다.
저자: Filip Bjelonic, Fabian Tischhauser, Marco Hutter | 날짜: 2025-09-08 | URL: https://arxiv.org/abs/2509.06342 📄 PDF
Figure 1. Comparison of real and simulated robot trajectories
이족 로봇의 시뮬레이션-실제 전이 문제를 해결하기 위해 강화학습과 영구자석 동기 전동기(PMSM)의 물리 기반 에너지 모델을 통합한 프레임워크를 제안하며, 최소한의 파라미터로 현실성을 확보하면서 에너지 효율성을 달성한다.
Figure 1. Comparison of real and simulated robot trajectories
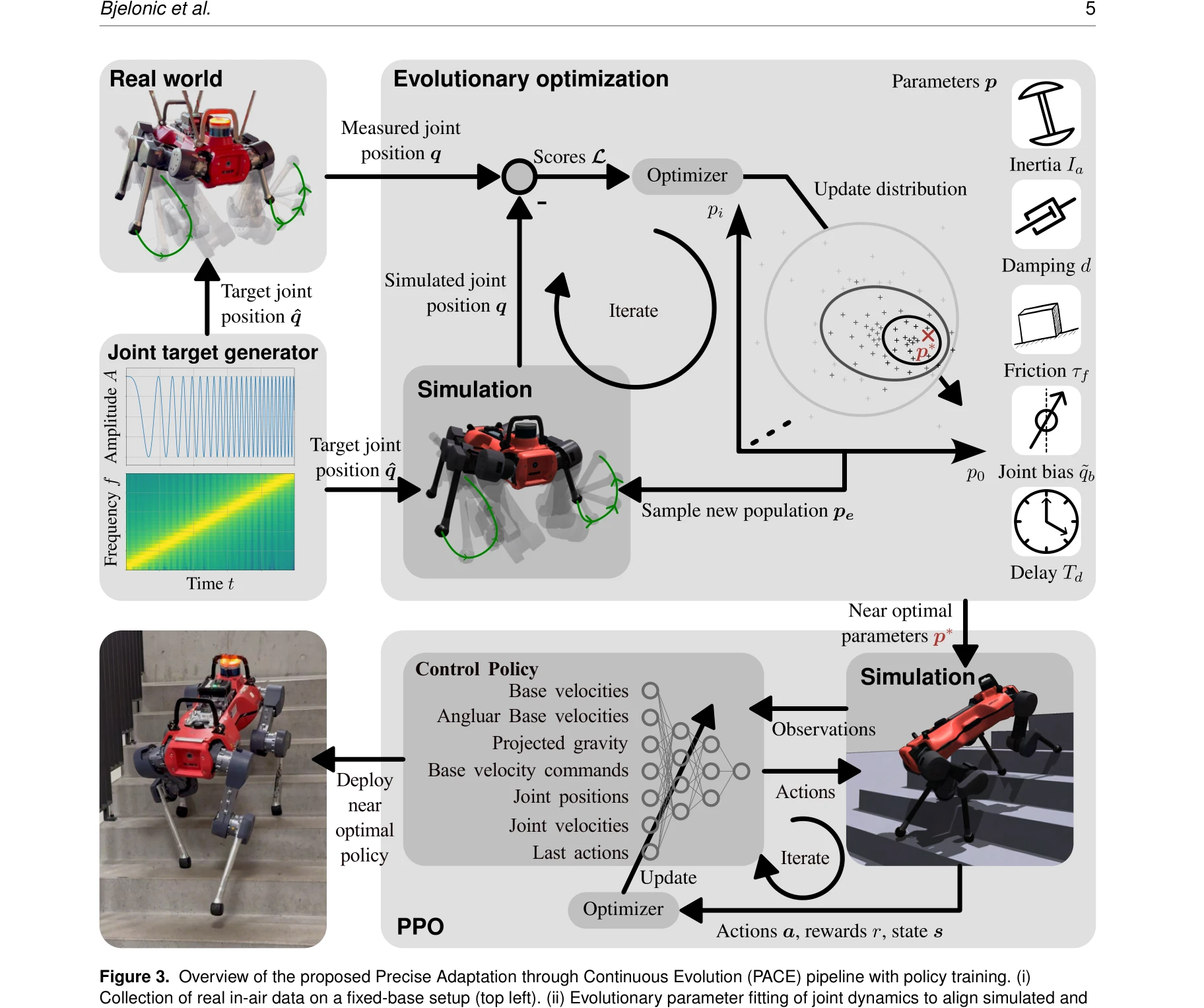
Figure 3. Overview of the proposed Precise Adaptation through Continuous Evolution (PACE) pipeline with policy training.
총평: 이 논문은 물리 기반 모델링과 강화학습을 체계적으로 결합하여 실제 다리 로봇의 시뮬레이션 전이 문제를 효과적으로 해결하며, 광범위한 플랫폼 검증과 에너지 효율성 개선으로 높은 실용성과 신뢰성을 입증한다.