Essence
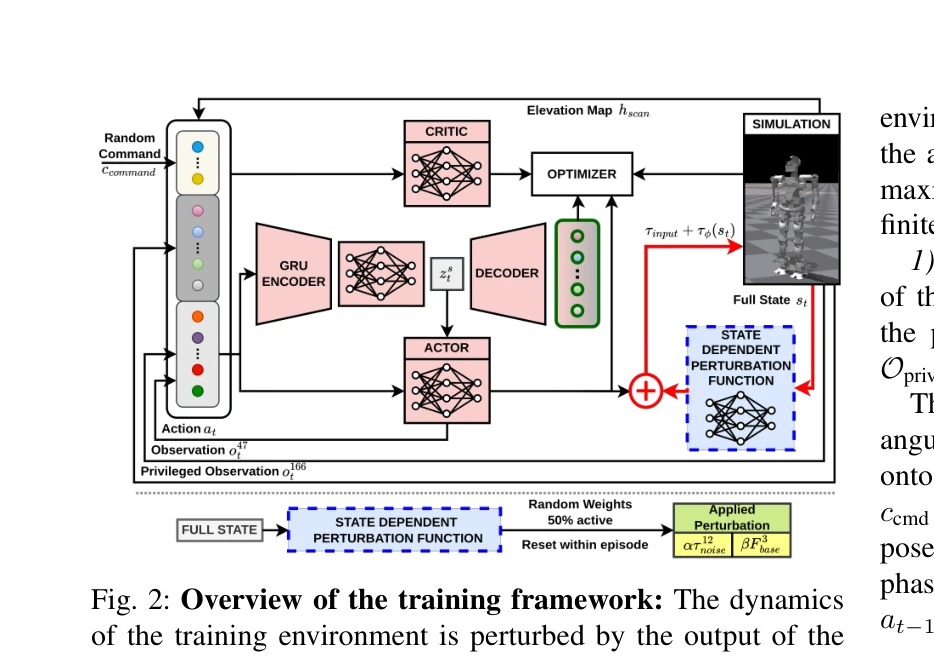
Fig. 2: Overview of the training framework: The dynamics
본 논문은 기존 domain randomization의 한계를 극복하기 위해 상태 의존적인 joint torque space perturbation을 주입하여 humanoid 로봇의 sim-to-real 전이를 개선하는 방법을 제안한다.
저자: Junhyeok Rui Cha, Woohyun Cha, Jaeyong Shin, Donghyeon Kim, Jaeheung Park | 날짜: 2025-04-09 | URL: https://arxiv.org/abs/2504.06585 📄 PDF
Fig. 2: Overview of the training framework: The dynamics
본 논문은 기존 domain randomization의 한계를 극복하기 위해 상태 의존적인 joint torque space perturbation을 주입하여 humanoid 로봇의 sim-to-real 전이를 개선하는 방법을 제안한다.
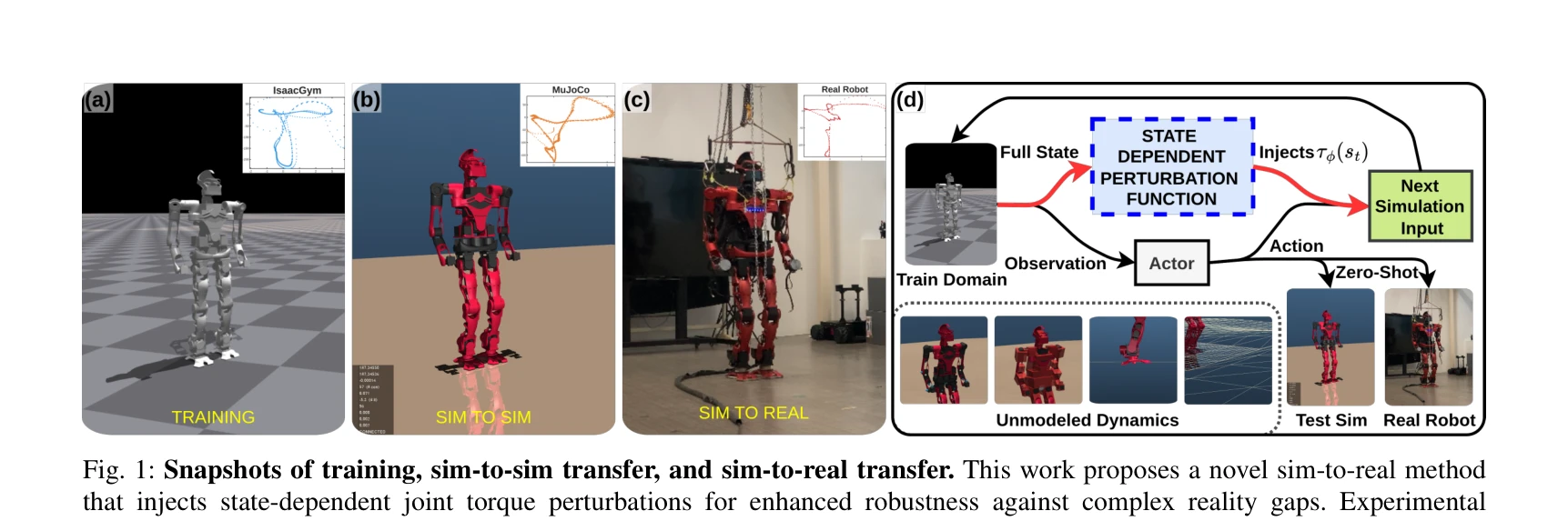
Fig. 1: Snapshots of training, sim-to-sim transfer, and sim-to-real transfer. This work proposes a novel sim-to-real met
Fig. 2: Overview of the training framework: The dynamics
총평: 본 논문은 domain randomization의 근본적 한계를 creative하게 해결하고 full-sized humanoid 로봇에서 실증적 검증을 통해 sim-to-real 전이 분야에 유의미한 기여를 한다. 다만 방법의 일반화 가능성과 실제 배포 시나리오에서의 추가 고려사항에 대한 더 깊은 분석이 있으면 완성도가 높아질 수 있다.