Essence
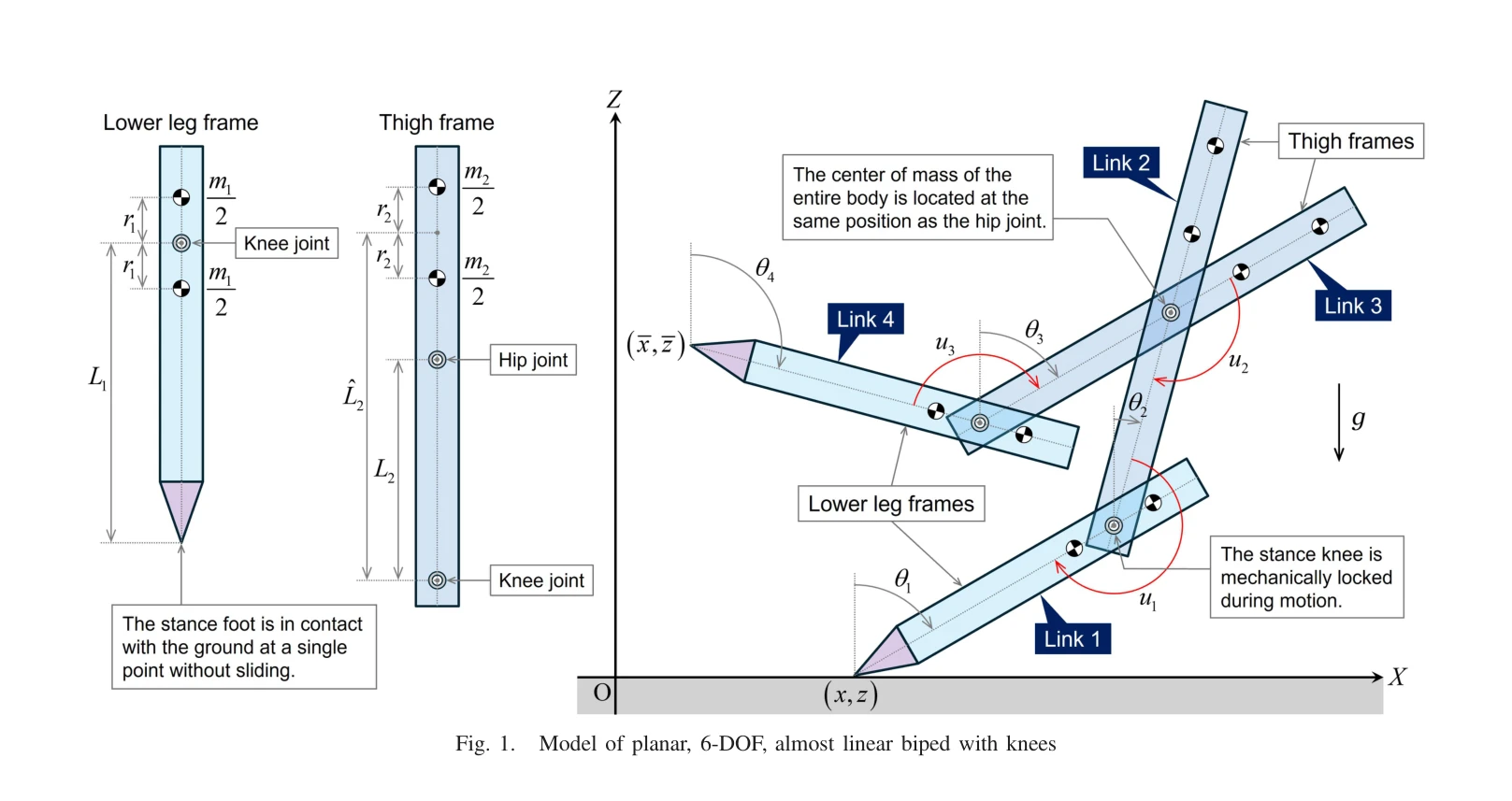
Figure 1 shows the model of the planar 6-DOF biped robot
거의 선형 역학 모델을 갖는 무릎 관절이 있는 평면 이족보행 로봇에서 Taylor 전개를 이용한 선형화를 통해 수치 적분 없이 점프로 안정적인 보행을 생성하고 즉각적인 보행 가능성 판정을 수행한다.
저자: Fumihiko Asano, Ning Lei, Taiki Sedoguchi | 날짜: 2026-04-14 | URL: https://arxiv.org/abs/2604.12274 📄 PDF
Figure 1 shows the model of the planar 6-DOF biped robot
거의 선형 역학 모델을 갖는 무릎 관절이 있는 평면 이족보행 로봇에서 Taylor 전개를 이용한 선형화를 통해 수치 적분 없이 점프로 안정적인 보행을 생성하고 즉각적인 보행 가능성 판정을 수행한다.
Figure 1 shows the model of the planar 6-DOF biped robot
총평: 이 논문은 거의 선형 역학을 갖는 무릎 관절 이족보행 로봇에서 선형화를 통한 실시간 보행 가능성 판정이라는 실용적으로 중요한 문제를 해결하며, 차원 축소 및 근사 정확도 분석에서 상세한 기여를 제공한다. 다만 AL3 로봇의 특수성과 실제 로봇 검증 부족이 일반화 가능성을 제한한다.