Essence
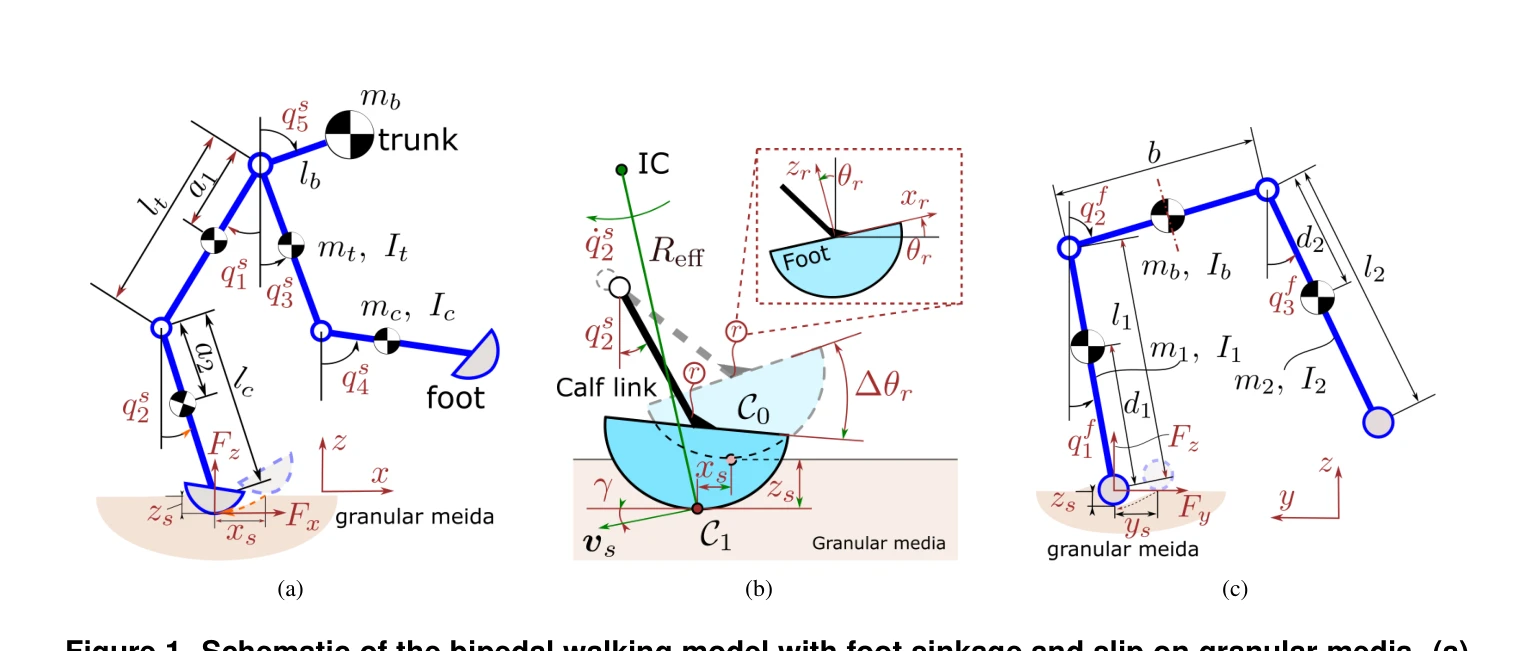
Figure 1. Schematic of the bipedal walking model with foot sinkage and slip on granular media. (a)
본 논문은 모래와 같은 입자성 지형에서 이족 로봇의 보행 동역학을 모델링하기 위해 발의 침하(sinkage)와 슬립(slip)을 고려한 3개의 추가 자유도를 도입한 동적 발-지형 상호작용 모델을 제시한다.
저자: Xunjie Chen, Xinyan Huang, Peter Shan, Jingang Yi, Tao Liu | 날짜: 2026-04-13 | URL: https://arxiv.org/abs/2604.11981 📄 PDF
Figure 1. Schematic of the bipedal walking model with foot sinkage and slip on granular media. (a)
본 논문은 모래와 같은 입자성 지형에서 이족 로봇의 보행 동역학을 모델링하기 위해 발의 침하(sinkage)와 슬립(slip)을 고려한 3개의 추가 자유도를 도입한 동적 발-지형 상호작용 모델을 제시한다.
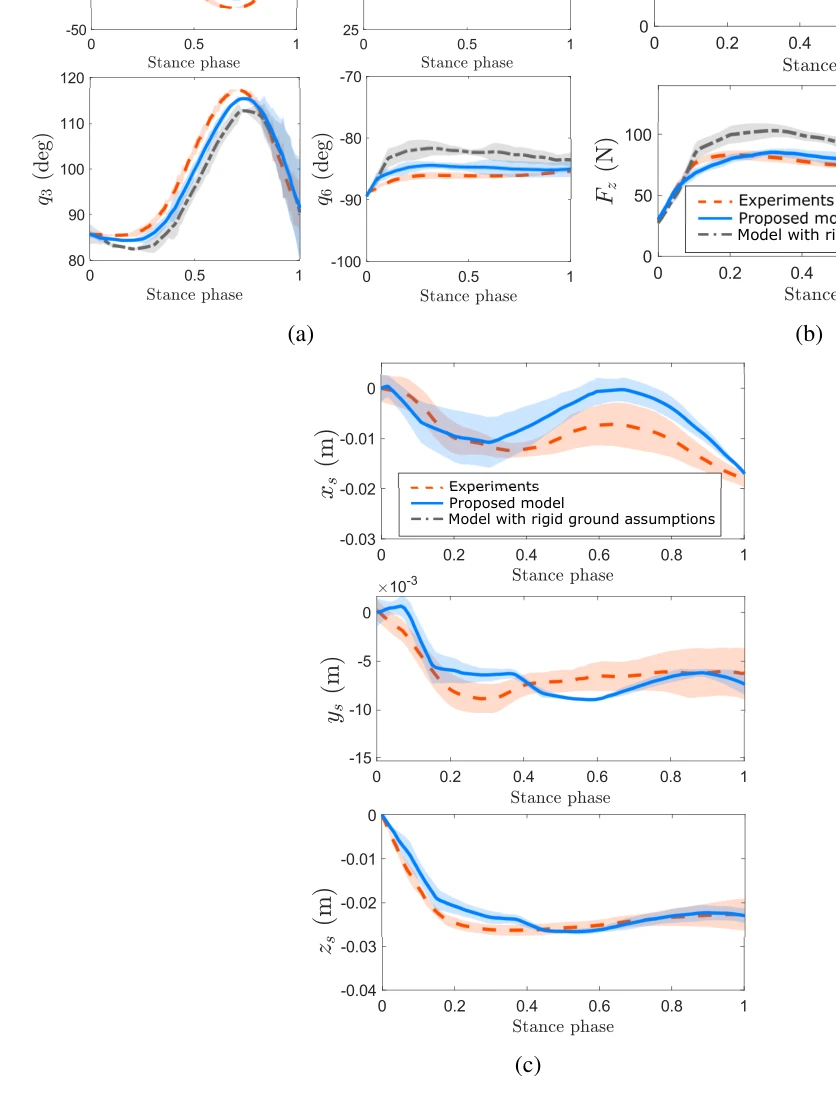
Figure 4. Comparisons of robot locomotion results on granular media within one stance phase.
Figure 1. Schematic of the bipedal walking model with foot sinkage and slip on granular media. (a)
총평: 본 논문은 입자성 지형에서의 이족 보행 동역학 모델링에 있어 발의 침하와 슬립을 처음으로 명시적으로 다룬 중요한 기여를 제시하며, 실험 검증을 통해 모델의 신뢰성을 입증했다. 제안된 모델은 granular terrain에서의 로봇 보행 제어 및 최적화를 위한 필수적인 기초 도구로서 높은 가치를 가진다.