Achievement
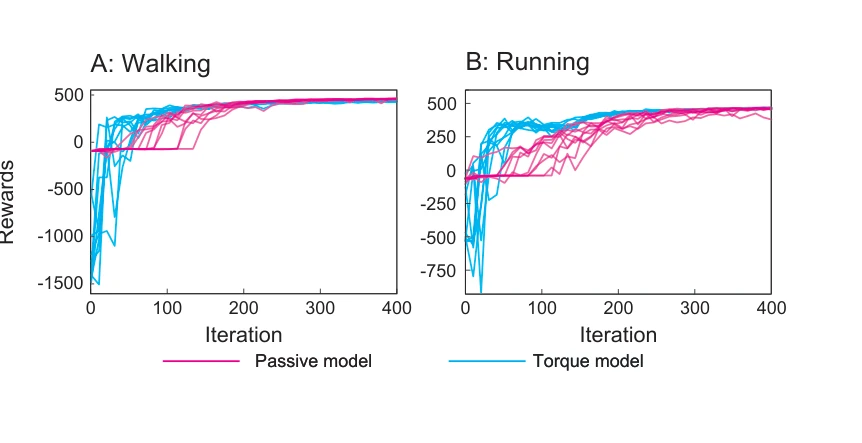
Figure 3: Learning curves of passive model and torque model in 10 trials. (A)
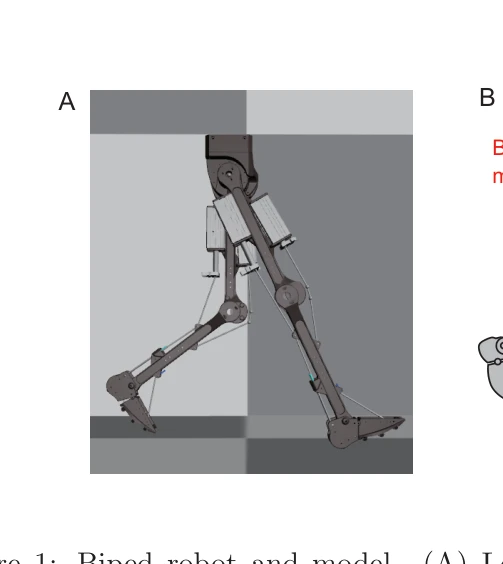
- Limit Cycle 수렴: 수동 모델은 궤적이 limit cycle에 빠르게 수렴하여 안정적인 보행·주행을 생성한다.
- 에너지 효율성: 어트랙터 기반 학습으로 획득한 운동은 토크 모델 대비 월등히 에너지 효율적이다.
- 강건성: 수동 역학으로 생성된 운동이 외부 섭동에 더 강건하다.
- 학습 특성: 수동 모델은 보상 수렴까지는 더 오래 걸리지만, 최종적으로 고성능 운동을 획득한다.