Essence
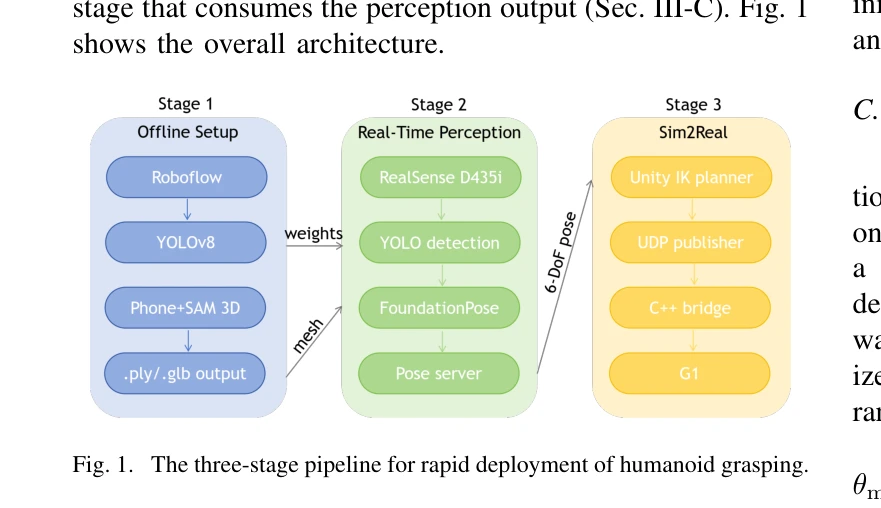
Fig. 1. The three-stage pipeline for rapid deployment of humanoid grasping.
Foundation model들(YOLOv8, SAM 3D, FoundationPose)을 통합하여 휴머노이드 로봇의 새로운 물체 조작 배포 시간을 1-2일에서 약 30분으로 단축하는 end-to-end 파이프라인을 제시한다.
저자: Yifei Yan, Yankai Liao, Linqi Ye | 날짜: 2026-04-19 | URL: https://arxiv.org/abs/2604.17258 📄 PDF
Fig. 1. The three-stage pipeline for rapid deployment of humanoid grasping.
Foundation model들(YOLOv8, SAM 3D, FoundationPose)을 통합하여 휴머노이드 로봇의 새로운 물체 조작 배포 시간을 1-2일에서 약 30분으로 단축하는 end-to-end 파이프라인을 제시한다.
Fig. 1. The three-stage pipeline for rapid deployment of humanoid grasping.
총평: Foundation model들의 효과적 통합으로 휴머노이드 로봇 배포 시간을 획기적으로 단축한 실용적이고 우수한 논문이며, 자동 주석, zero-shot 3D 재구성, zero-shot pose tracking을 연계한 modular 설계가 산업 적용성을 높인다. 다만 제한된 물체 유형과 환경 조건에서의 검증이 일반화 가능성을 판단하기 위해 추가 필요하다.